Advanced Calculus of Several Variables (1973)
Part VI. The Calculus of Variations
Chapter 3. THE SIMPLEST VARIATIONAL PROBLEM
We are now prepared to discuss the first problem mentioned in the introduction to this chapter. Given f : ![]() 3 →
3 → ![]() , we seek to minimize (or maximize) the function
, we seek to minimize (or maximize) the function ![]() defined by
defined by
![]()
amongst those functions ![]() such that ψ(a) = α and ψ(b) = β (where α and β are given real numbers).
such that ψ(a) = α and ψ(b) = β (where α and β are given real numbers).
Let M denote the subset of ![]() consisting of those functions ψ that satisfy the endpoint conditions ψ(a) = α and ψ(b) = β. Then we are interested in the local extrema of F on the subset M. If F is differentiable at
consisting of those functions ψ that satisfy the endpoint conditions ψ(a) = α and ψ(b) = β. Then we are interested in the local extrema of F on the subset M. If F is differentiable at ![]() , and F
, and F![]() M has a local extremum at φ, then Theorem 2.3 implies that
M has a local extremum at φ, then Theorem 2.3 implies that
![]()
We will say that the function ![]() is an extremal for F on M if it satisfies the necessary condition (2). We will not consider here the difficult matter of finding sufficient conditions under which an extremal actually yields a local extremum.
is an extremal for F on M if it satisfies the necessary condition (2). We will not consider here the difficult matter of finding sufficient conditions under which an extremal actually yields a local extremum.
In order that we be able to ascertain whether a given function ![]() is or is not an extremal for F on M, that is, whether or not dFφ
is or is not an extremal for F on M, that is, whether or not dFφ![]() TMφ = 0, we must (under appropriate conditions on f) explicitly compute the differential dFφ of F at φ, and we must determine just what the tangent set TMφ of M at φ is.
TMφ = 0, we must (under appropriate conditions on f) explicitly compute the differential dFφ of F at φ, and we must determine just what the tangent set TMφ of M at φ is.
The latter problem is quite easy. First pick a fixed element ![]() . Then, given any
. Then, given any ![]() , the difference φ − φ0 is an element of the subspace
, the difference φ − φ0 is an element of the subspace
![]()
of ![]() , consisting of those
, consisting of those ![]() functions on [a, b] that are zero at both end-points. Conversely, if
functions on [a, b] that are zero at both end-points. Conversely, if ![]() , then clearly
, then clearly ![]() . Thus M is a hyperplane in
. Thus M is a hyperplane in ![]() , namely the translate by φ0 of the subspace
, namely the translate by φ0 of the subspace ![]() . But the tangent set of a hyperplane is, at every point, simply the subspace of which it is a translate (see Exercise 2.7). Therefore
. But the tangent set of a hyperplane is, at every point, simply the subspace of which it is a translate (see Exercise 2.7). Therefore
![]()
for every ![]() .
.
The following theorem gives the computation of dFφ.
Theorem 3.1 Let ![]() be defined by (1), with f :
be defined by (1), with f : ![]() 3 →
3 → ![]() being a
being a ![]() function. Then F is differentiable with
function. Then F is differentiable with
![]()
for all ![]() .
.
In the use of partial derivative notation on the right-hand side of (4), we are thinking of ![]() .
.
PROOF If F is differentiable at ![]() , then dFφ(h) should be the linear (in h) part of F(φ + h) − F(φ). To investigate this difference, we write down the second degree Taylor expansion of f at the point
, then dFφ(h) should be the linear (in h) part of F(φ + h) − F(φ). To investigate this difference, we write down the second degree Taylor expansion of f at the point ![]() .
.

where
![]()
for some point ξ(t) of the line segment in ![]() 3 from (φ(t), φ′(t), t) to (φ(t) + h(t), φ′(t) + h′(t), t). If B is a large ball in
3 from (φ(t), φ′(t), t) to (φ(t) + h(t), φ′(t) + h′(t), t). If B is a large ball in ![]() 3 that contains in its interior the image of the continuous path
3 that contains in its interior the image of the continuous path ![]() , and M is the maximum of the absolute values of the second order partial derivatives of f at points of B, then it follows easily that
, and M is the maximum of the absolute values of the second order partial derivatives of f at points of B, then it follows easily that
![]()
for all ![]() , if
, if ![]() h
h![]() 0 is sufficiently small.
0 is sufficiently small.
From (5) we obtain
![]()
with
![]()
and
![]()
In order to prove that F is differentiable at φ with dFφ = L as desired, it suffices to note that ![]() is a continuous linear function (by Example 4 of Section 2), and then to show that,
is a continuous linear function (by Example 4 of Section 2), and then to show that,
![]()
But it follows immediately from (6) that
and this implies (7).
![]()
With regard to condition (2), we are interested in the value of dFφ(h) when ![]() .
.
Corollary 3.2 Assume, in addition to the hypotheses of Theorem 3.1, that φ is a ![]() function and that
function and that ![]() . Then
. Then
![]()
PROOF If φ is a ![]() function, then ∂f/∂y(φ(t), φ′(t), t) is a
function, then ∂f/∂y(φ(t), φ′(t), t) is a ![]() function of
function of ![]() . A simple integration by parts therefore gives
. A simple integration by parts therefore gives
because h(a) = h(b) = 0. Thus formula (8) follows from formula (4) in this case.
![]()
This corollary shows that the ![]() function
function ![]() is an extremal for F on M if and only if
is an extremal for F on M if and only if
![]()
for every ![]() function h on [a, b] such that h(a) = h(b) = 0. The following lemma verifies the natural guess that (9) can hold for all such h only if the function within the brackets in (9) vanishes identically on [a, b].
function h on [a, b] such that h(a) = h(b) = 0. The following lemma verifies the natural guess that (9) can hold for all such h only if the function within the brackets in (9) vanishes identically on [a, b].
Lemma 3.3 If φ : [a, b] → ![]() is a continuous function such that
is a continuous function such that
![]()
for every ![]() , then φ is identically zero on [a, b].
, then φ is identically zero on [a, b].
PROOF Suppose, to the contrary, that φ(t0) ≠ 0 for some ![]() . Then, by continuity, φ is nonzero on some interval containing t0, say, φ(t) > 0 for
. Then, by continuity, φ is nonzero on some interval containing t0, say, φ(t) > 0 for ![]() . If h is defined on [a, b] by
. If h is defined on [a, b] by

then ![]() , and
, and
![]()
because the integrand is positive except at the endpoints t1 and t2 (Fig. 6.3). This contradiction proves that φ ≡ 0 on [a, b].
![]()
The fundamental necessity condition for extremals, the Euler–Lagrange equation, follows immediately from Corollary 3.2 and Lemma 3.3.
Figure 6.3
Theorem 3.4 Let ![]() be defined by (1), with f :
be defined by (1), with f : ![]() 3 →
3 → ![]() being a
being a ![]() function. Then the
function. Then the ![]() function
function ![]() is an extremal for F on
is an extremal for F on ![]() : ψ(a) = α) and ψ(b) = β} if and only if
: ψ(a) = α) and ψ(b) = β} if and only if
![]()
for all ![]() .
.
Equation (10) is the Euler–Lagrange equation for the extremal φ. Note that it is actually a second order (ordinary) differential equation for φ, since the chain rule gives
![]()
where the partial derivatives of f are evaluated at ![]() .
.
REMARKS The hypothesis in Theorem 3.4 that the extremal φ is a ![]() function (rather than merely
function (rather than merely ![]() ) is actually unnecessary. First, if φ is an extremal which is only assumed to be
) is actually unnecessary. First, if φ is an extremal which is only assumed to be ![]() then, by a more careful analysis, it can still be proved that ∂f/∂y(φ(t), φ′(t), t) is a differentiable function (of t) satisfying the Euler–Lagrange equation. Second, if φ is a
then, by a more careful analysis, it can still be proved that ∂f/∂y(φ(t), φ′(t), t) is a differentiable function (of t) satisfying the Euler–Lagrange equation. Second, if φ is a ![]() extremal such that
extremal such that
![]()
for all ![]() , then it can be proved that φ is, in fact, a
, then it can be proved that φ is, in fact, a ![]() function. We will not include these refinements because Theorem 3.4 as stated, with the additional hypothesis that φ is
function. We will not include these refinements because Theorem 3.4 as stated, with the additional hypothesis that φ is ![]() , will suffice for our purposes.
, will suffice for our purposes.
We illustrate the applications of the Euler–Lagrange equation with two standard first examples.
Example 1 We consider a special case of the problem of finding the path of minimal length joining the points (a, α) and (b, β) in the tx-plane. Suppose in particular that φ : [a, b] → ![]() is a
is a ![]() function with φ(a) = α and φ(b) = βwhose graph has minimal length, in comparison with the graphs of all other such functions. Then φ is an extremal (subject to the endpoint conditions) of the function
function with φ(a) = α and φ(b) = βwhose graph has minimal length, in comparison with the graphs of all other such functions. Then φ is an extremal (subject to the endpoint conditions) of the function
![]()
whose integrand function is
![]()
Since ∂f/∂x = 0 and ∂f/∂y = y/(1 + y2)1/2, the Euler–Lagrange equation for φ is therefore
![]()
which upon computation reduces to
![]()
Therefore φ″ = 0 on [a, b], so φ is a linear function on [a, b], and its graph is (as expected) the straight line segment from (a, α) to (b, β).
Example 2 We want to minimize the area of a surface of revolution. Suppose in particular that φ : [a, b] → ![]() is a
is a ![]() function with φ(a) = α and φ(b) = β, such that the surface obtained by revolving the curve x = φ(t) about the t-axis has minimal area, in comparison with all other surfaces of revolution obtained in this way (subject to the endpoint conditions). Then φ is an extremal of the function
function with φ(a) = α and φ(b) = β, such that the surface obtained by revolving the curve x = φ(t) about the t-axis has minimal area, in comparison with all other surfaces of revolution obtained in this way (subject to the endpoint conditions). Then φ is an extremal of the function
![]()
whose integrand function is
![]()
Here
![]()
Upon substituting x = φ(t), y = φ′(t) into the Euler–Lagrange equation, and simplifying, we obtain
![]()
It follows that
![]()
(differentiate the latter equation), or
![]()
The general solution of this first order equation is
![]()
where d is a second constant. Thus the curve x = φ(t) is a catenary (Fig. 6.4) passing through the given points (a, α) and (b, β).
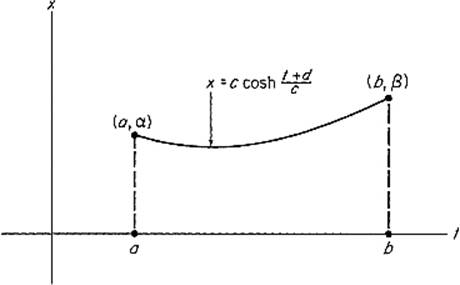
Figure 6.4
It can be shown that, if b − a is sufficiently large compared to α and β, then no catenary of the form (11) passes through the given points (a, α) and (b, β), so in this case there will not exist a smooth extremal.
This serves to emphasize the fact that the Euler–Lagrange equation merely provides a necessary condition that a given function φ maximize or minimize the given integral functional F. It may happen either that there exist no extremals (solutions of the Euler–Lagrange equation that satisfy the endpoint conditions), or that a given extremal does not maximize or minimize F (just as a critical point of a function on ![]() n need not provide a maximum or minimum).
n need not provide a maximum or minimum).
All of our discussion thus far can be generalized from the real-valued to the vector-valued case, that is obtained by replacing the space ![]() of real-valued functions with the space
of real-valued functions with the space ![]() of
of ![]() paths in
paths in ![]() n. The proofs are all essentially the same, aside from the substitution of vector notation for scalar notation, so we shall merely outline the results.
n. The proofs are all essentially the same, aside from the substitution of vector notation for scalar notation, so we shall merely outline the results.
Given a ![]() function f :
function f : ![]() n ×
n × ![]() n ×
n × ![]() →
→ ![]() , we are interested in the extrema of the function
, we are interested in the extrema of the function ![]() defined by
defined by
![]()
amongst those ![]() paths ψ : [a, b] →
paths ψ : [a, b] → ![]() n such that ψ(a) = α and ψ(b) = β, where α and β are given points in
n such that ψ(a) = α and ψ(b) = β, where α and β are given points in ![]() n.
n.
Denoting by M the subset of ![]() consisting of those paths that satisfy the endpoint conditions, the path
consisting of those paths that satisfy the endpoint conditions, the path ![]() is an extremal for F on M if and only if
is an extremal for F on M if and only if
![]()
We find, just as before, that M is a hyperplane. For each ![]() ,
,
![]()
With the notation ![]() , let us write
, let us write
![]()
so ∂f/∂x and ∂f/∂y are vectors. If φ is a ![]() path in
path in ![]() n and
n and ![]() , then we find (by generalizing the proofs of Theorem 3.1 and Corollary 3.2) that
, then we find (by generalizing the proofs of Theorem 3.1 and Corollary 3.2) that
![]()
Compare this with Eq. (8); here the dot denotes the Euclidean inner product in ![]() n.
n.
By an n-dimensional version of (Lemma 3.3), it follows from (13) that the ![]() path
path ![]() is an extremal for F on M if and only if
is an extremal for F on M if and only if
![]()
This is the Euler–Lagrange equation in vector form. Taking components, we obtain the scalar Euler–Lagrange equations
![]()
Example 3 Suppose that φ : [a, b] → ![]() n is a minimal-length
n is a minimal-length ![]() path with endpoints α = φ(a) and β = φ(b). Then φ is an extremal for the function
path with endpoints α = φ(a) and β = φ(b). Then φ is an extremal for the function ![]() defined by
defined by
![]()
whose integrand function is
![]()
Since ∂f/∂xi = 0 and ∂f/∂yi = yi/(y12 + · · · + yn2)1/2, the Euler-Lagrange equation for φ give
![]()
Therefore the unit tangent vector φ′(t)/![]() φ′(t)
φ′(t)![]() is constant, so it follows that the image of φ is the straight line segment from α to β.
is constant, so it follows that the image of φ is the straight line segment from α to β.
Exercises
3.1Suppose that a particle of mass m moves in the force field F: ![]() 3 →
3 → ![]() 3, where F(x) = − ∇ V(x) with V:
3, where F(x) = − ∇ V(x) with V: ![]() 3 →
3 → ![]() a given potential energy function. According to Hamilton's principle, the path φ : [a, b] →
a given potential energy function. According to Hamilton's principle, the path φ : [a, b] → ![]() 3 of the particle is an extremal of the integral of the difference of the kinetic and potential energies of the particle,
3 of the particle is an extremal of the integral of the difference of the kinetic and potential energies of the particle,
![]()
Show that the Euler-Lagrange equations (15) for this problem reduce to Newton's law of motion
![]()
3.2If f(x, y, t) is actually independent of t, so ∂f/∂t = 0, and φ: [a, b] → ![]() satisfies the Euler-Lagrange equation
satisfies the Euler-Lagrange equation
![]()
show that y ∂f/∂y − f is constant, that is,
![]()
for all ![]() .
.
3.3(The brachistochrone) Suppose a particle of mass m slides down a frictionless wire connecting two fixed points in a vertical plane (Fig. 6.5). We wish to determine the shape y = φ(x) of the wire if the time of descent is minimal. Let us take the origin as the initial point, with the y-axis pointing downward. The velocity v of the particle is determined by the energy equation ![]() , whence
, whence ![]() . The time T of descent from (0, 0) to (x1, y1) is therefore given by
. The time T of descent from (0, 0) to (x1, y1) is therefore given by
![]()
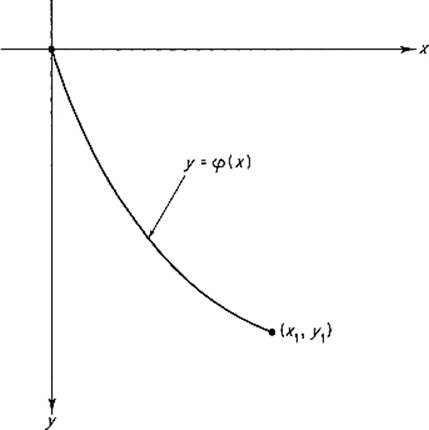
Figure 6.5
Show that the curve of minimal descent time is the cycloid
![]()
generated by the motion of a fixed point on the circumference of a circle of radius a which rolls along the x-axis [the constant a being determined by the condition that it pass through the point (x1, y1)]. Hint: Noting that
![]()
is independent of x, apply the result of the previous exercise,
![]()
Make the substitution y = 2a sin2 θ/2 in order to integrate this equation.
Geodesics. In the following five problems we discuss geodesics (shortest paths) on a surface S in ![]() 3. Suppose that S is parametrized by
3. Suppose that S is parametrized by ![]() , and that the curve γ : [a, b] → S is the composition γ = T
, and that the curve γ : [a, b] → S is the composition γ = T ![]() c, where
c, where ![]() . Then, by Exercise V.1.8, the length of γ is
. Then, by Exercise V.1.8, the length of γ is
![]()
where
![]()
In order for γ to be a minimal-length path on S from γ(a) to γ(b), it must therefore be an extremal for the integral s(γ). We say that γ is a geodesic on S if it is an extremal (with endpoints fixed) for the integral
![]()
which is somewhat easier to work with.
3.4(a)Suppose that f(x1, x2, y1, y2, t) is independent of t, so ∂f/∂t = 0. If φ(t) = (x1(t), x2(t)) is an extremal for
![]()
prove that
![]()
is constant for ![]() . Hint: Show that
. Hint: Show that
![]()
(b)If f(u, v, u′, v′) = E(u, v)(u′)2 + 2F(u, v)u′v′ + G(u, v)(v′)2, show that
![]()
(c)Conclude from (a) and (b) that a geodesic φ on the surface S is a constant-speed curve, ![]() φ′(t)
φ′(t)![]() = constant.
= constant.
3.5Deduce from the previous problem [part (c)] that, if γ: [a, b] → S is a geodesic on the surface S, then γ is an extremal for the pathlength integral s(γ). Hint: Compare the Euler-Lagrange equations for the two integrals.
3.6Let S be the vertical cylinder x2 + y2 = r2 in ![]() 3, and parametrize S by
3, and parametrize S by ![]() , where T(θ, z) = (r cos θ, r sin θ, z). If γ(t) = T(θ(t), z(t)) is a geodesic on S, show that the Euler-Lagrange equations for the integral (*) reduce to
, where T(θ, z) = (r cos θ, r sin θ, z). If γ(t) = T(θ(t), z(t)) is a geodesic on S, show that the Euler-Lagrange equations for the integral (*) reduce to
![]()
so θ(t) = at + b, z(t) = ct + d. The case a = 0 gives a vertical straight line, the case c = 0 gives a horizontal circle, while the case a ≠ 0, c ≠ 0 gives a helix on S (see Exercise II.1.12).
3.7Generalize the preceding problem to the case of a “generalized cylinder” which consists of all vertical straight lines through the smooth curve ![]() .
.
3.8Show that the geodesics on a sphere S are the great circles on S.
3.9Denote by ![]() the vector space of twice continuously differentiable functions on [a, b], and by
the vector space of twice continuously differentiable functions on [a, b], and by ![]() the subspace consisting of those functions
the subspace consisting of those functions ![]() such that ψ(a) = ψ′(a) = ψ(b) = ψ′(b) = 0.
such that ψ(a) = ψ′(a) = ψ(b) = ψ′(b) = 0.
(a)Show that
![]()
defines a norm on ![]() .
.
(b)Given a ![]() function f:
function f: ![]() 4 →
4 → ![]() , define
, define ![]() by
by
![]()
Then prove, by the method of proof of Theorem 3.1, that F is differentiable with
![]()
where the partial derivatives of f are evaluated at (φ(t), φ′(t), φ″(t), t).
(c)Show, by integration by parts as in the proof of Corollary 3.2, that
![]()
if ![]() .
.
(d)Conclude that φ satisfies the second order Euler-Lagrange equation
![]()
if φ is an extremal for F, subject to given endpoint conditions on φ and φ′ (assuming that φ is of class ![]() —note that the above equation is a fourth order ordinary differential equation in φ).
—note that the above equation is a fourth order ordinary differential equation in φ).