Advanced Calculus of Several Variables (1973)
Part VI. The Calculus of Variations
Chapter 5. MULTIPLE INTEGRAL PROBLEMS
Thus far, we have confined our attention to extremum problems associated with the simple integral ![]() , where
, where ![]() is a function of one variable. In this section we briefly discuss the analogous problems associated with a multiple integral whose integrand involves an “unknown” function of several variables.
is a function of one variable. In this section we briefly discuss the analogous problems associated with a multiple integral whose integrand involves an “unknown” function of several variables.
Let D be a cellulated n-dimensional region in ![]() n. Given f :
n. Given f : ![]() 2n+1 →
2n+1 → ![]() , we seek to maximize or minimize the function F defined by
, we seek to maximize or minimize the function F defined by
![]()
amongst those ![]() functions
functions ![]() : D →
: D → ![]() which agree with a given fixed function
which agree with a given fixed function ![]() 0 : D →
0 : D → ![]() on the boundary ∂D of the region D. In terms of the gradient vector
on the boundary ∂D of the region D. In terms of the gradient vector
![]()
we may rewrite (1) as
![]()
Throughout this section we will denote the first n coordinates in ![]() 2n+1 by x1, . . . , xn, the (n + 1)th coordinate by y, and the last n coordinates in
2n+1 by x1, . . . , xn, the (n + 1)th coordinate by y, and the last n coordinates in ![]() 2n+1 by z1, . . . , zn. Thus we are thinking of the Cartesian factorization
2n+1 by z1, . . . , zn. Thus we are thinking of the Cartesian factorization ![]() 2n+1 =
2n+1 = ![]() n ×
n × ![]() ×
× ![]() n, and therefore write (x, y, z) for the typical point of
n, and therefore write (x, y, z) for the typical point of ![]() 2n+1. In terms of this notation, we are interested in the function
2n+1. In terms of this notation, we are interested in the function
![]()
where y = ψ(x) and z = ∇![]() (x).
(x).
The function F is defined by (2) on the vector space ![]() that consists of all real-valued
that consists of all real-valued ![]() functions on D (with the usual pointwise addition and scalar multiplication). We make
functions on D (with the usual pointwise addition and scalar multiplication). We make ![]() into a normed vector space by defining
into a normed vector space by defining
![]()
It can then be verified that the normed vector space ![]() is complete. The proof of this fact is similar to that of Corollary 1.5 (that
is complete. The proof of this fact is similar to that of Corollary 1.5 (that ![]() is complete), but is somewhat more tedious, and will be omitted (being unnecessary for what follows in this section).
is complete), but is somewhat more tedious, and will be omitted (being unnecessary for what follows in this section).
Let M denote the subset of ![]() consisting of those functions
consisting of those functions ![]() that satisfy the “boundary condition”
that satisfy the “boundary condition”
![]()
Then, given any ![]() , the difference ψ − ψ0 is an element of the subspace
, the difference ψ − ψ0 is an element of the subspace
![]()
of ![]() , consisting of all those
, consisting of all those ![]() functions on D that vanish on ∂D. Conversely, if
functions on D that vanish on ∂D. Conversely, if ![]() , then clearly
, then clearly ![]() . Thus M is a hyperplane in
. Thus M is a hyperplane in ![]() , namely, the translate by the fixed element
, namely, the translate by the fixed element ![]() of the subspace
of the subspace ![]() . Consequently
. Consequently
![]()
for all ![]() .
.
If ![]() is differentiable at
is differentiable at ![]() , and F
, and F![]() M has a local extremum at φ, Theorem 2.3 implies that
M has a local extremum at φ, Theorem 2.3 implies that
![]()
Just as in the single-variable case, we will call the function ![]() an extremal for F on M if it satisfies the necessary condition (4).
an extremal for F on M if it satisfies the necessary condition (4).
The following theorem is analogous to Theorem 3.1, and gives the computation of the differential dFφ when F is defined by (1).
Theorem 5.1 Suppose that D is a compact cellulated n-dimensional region in ![]() n, and that f :
n, and that f : ![]() 2n+1 →
2n+1 → ![]() is a
is a ![]() function. Then the function
function. Then the function ![]() defined by (1) is differentiable with
defined by (1) is differentiable with
![]()
for all ![]() . The partial derivatives
. The partial derivatives
![]()
in (5) are evaluated at the point ![]() .
.
The method of proof of Theorem 5.1 is the same as that of Theorem 3.1, making use of the second degree Taylor expansion of f. The details will be left to the reader.
In view of condition (4), we are interested in the value of dFφ(h) when ![]() . The following theorem is analogous to Corollary 3.2.
. The following theorem is analogous to Corollary 3.2.
Theorem 5.2 Assume, in addition to the hypotheses of Theorem 5.1, that φ is a ![]() function and that
function and that ![]() . Then
. Then
![]()
Here also the partial derivatives of f are evaluated at ![]() .
.
PROOF Consider the differential (n − 1)-form defined on D by
![]()
A routine computation gives
![]()
where dx = dx1 ![]() · · ·
· · · ![]() dxn. Hence
dxn. Hence
![]()
Substituting this into Eq. (5), we obtain
![]()
But ∫D dω = ∫∂D ω = 0 by Stokes' theorem and the fact that ω = 0 on ∂D because ![]() . Thus Eq. (7) reduces to the desired Eq. (6).
. Thus Eq. (7) reduces to the desired Eq. (6).
![]()
Theorem 5.2 shows that the ![]() function
function ![]() is an extremal for F on M if and only if
is an extremal for F on M if and only if
![]()
for every ![]() . From this result and the obvious multivariable analog of Lemma 3.3 we immediately obtain the multivariable Euler–Lagrange equation.
. From this result and the obvious multivariable analog of Lemma 3.3 we immediately obtain the multivariable Euler–Lagrange equation.
Theorem 5.3 Let ![]() be defined by Eq. (1), with f :
be defined by Eq. (1), with f : ![]() 2n+1 →
2n+1 → ![]() being a
being a ![]() function. Then the
function. Then the ![]() function
function ![]() is an extremal for F on M if and only if
is an extremal for F on M if and only if
![]()
for all ![]() .
.
The equation
![]()
with the partial derivatives of f evaluated at (x, φ(x), ∇φ(x)), is the Euler–Lagrange equation for the extremal φ. We give some examples to illustrate its applications.
Example 1 (minimal surfaces) If D is a disk in the plane, and φ0 : D → ![]() a function, then the graph of φ0 is a disk in
a function, then the graph of φ0 is a disk in ![]() 3. We consider the following question. Under what conditions does the graph (Fig. 6.8) of the function φ : D →
3. We consider the following question. Under what conditions does the graph (Fig. 6.8) of the function φ : D → ![]() have minimal surface area, among the graphs of all those functions
have minimal surface area, among the graphs of all those functions ![]() : D →
: D → ![]() that agree with φ0 on the boundary curve ∂D of the disk D?
that agree with φ0 on the boundary curve ∂D of the disk D?
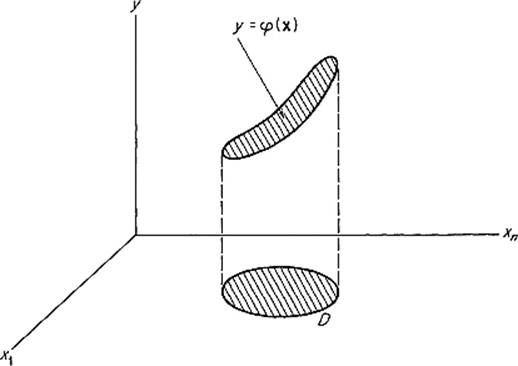
Figure 6.8
We can just as easily discuss the n-dimensional generalization of this question. So we start with a smooth compact n-manifold-with-boundary ![]() , and a
, and a ![]() function φ0 : D →
function φ0 : D → ![]() , whose graph y = φ0(x) is an n-manifold-with-boundary in
, whose graph y = φ0(x) is an n-manifold-with-boundary in ![]() n + 1.
n + 1.
The area F(φ) of the graph of the function φ : D → ![]() is given by formula (10) of Section V.4,
is given by formula (10) of Section V.4,
![]()
We therefore want to minimize the function ![]() defined by (1) with
defined by (1) with
![]()
Since
![]()
the Euler–Lagrange equation (8) for this problem is
![]()
Upon calculating the indicated partial derivatives and simplifying, we obtain
![]()
where
![]()
as usual. Equation (9) therefore gives a necessary condition that the area of the graph of y = φ(x) be minimal, among all n-manifolds-with-boundary in ![]() n+1 that have the same boundary.
n+1 that have the same boundary.
In the original problem of 2-dimensional minimal surfaces, it is customary to use the notation
With this notation, Eq. (9) takes the form
![]()
This is of course a second order partial differential equation for the unknown function z = φ(x, y).
Example 2 (vibrating membrane) In this example we apply Hamilton's principle to derive the wave equation for the motion of a vibrating n-dimensional “membrane.” The cases n = 1 and n = 2 correspond to a vibrating string and an “actual” membrane, respectively.
We assume that the equilibrium position of the membrane is the compact n-manifold-with-boundary
![]()
and that it vibrates with its boundary fixed. Let its motion be described by the function
![]()
in the sense that the graph y = φ(x, t) is the position in ![]() n+1 of the membrane at time t (Fig. 6.9).
n+1 of the membrane at time t (Fig. 6.9).
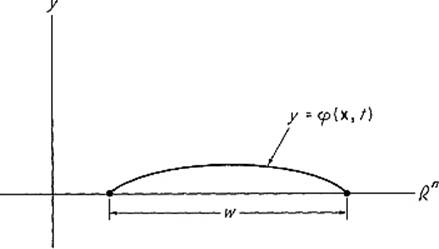
Figure 6.9
If the membrane has constant density σ, then its kinetic energy at time t is
![]()
We assume initially that the potential energy V of the membrane is proportional to the increase in its surface area, that is,
![]()
where a(t) is the area of the membrane at time t. The constant τ is called the “surface tension.” By formula (10) of Section V.4 we then have
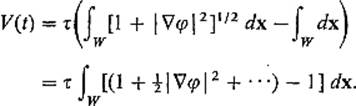
We now suppose that the deformation of the membrane is so slight that the higher order terms (indicated by the dots) may be neglected. The potential energy of the membrane at time t is then given by
![]()
According to Hamilton's principle of physics, the motion of the membrane is such that the value of the integral
![]()
is minimal for every time interval [a, b]. That is, if D = W × [a, b], then the actual motion φ is an extremal for the function ![]() defined by
defined by
![]()
on the hyperplane ![]() consisting of those functions
consisting of those functions ![]() that agree with φ on ∂D.
that agree with φ on ∂D.
If we temporarily write t = xn+1 and define f on ![]() 2n+3 =
2n+3 = ![]() 2n+1 ×
2n+1 × ![]() ×
× ![]() 2n+1 by
2n+1 by
![]()
then we may rewrite (12) as
![]()
where y = ψ(x) and z = ∇![]() (x). Since
(x). Since
![]()
it follows that the Euler–Lagrange equation (8) for this problem is
![]()
or
![]()
Equation (13) is the n-dimensional wave equation.