SAT Physics Subject Test
Chapter 6 Curved and Rotational Motion
ANGULAR MOMENTUM
So far we”ve developed rotational analogs for displacement, velocity, acceleration, and force. We will finish by developing a rotational analog for linear momentum; it”s called angular momentum.
Consider a small point mass m at distance r from the axis of rotation, moving with velocity v and acted upon by a tangential force F.
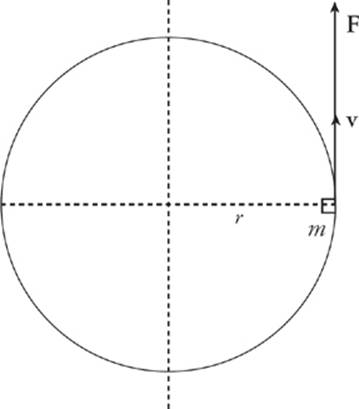
Then, by Newton”s second law
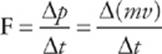
If we multiply both sides of this equation by r and notice that rF = τ, we get
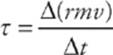
Therefore, to form the analog of the law F = ∆p/∆t (force equals the rate-of-change of linear momentum), we say that torque equals the rate-of-change of angular momentum, and the angular momentum (denoted by L) of the point mass m is defined by the equation
L = rmv
If the point mass m does not move in a circular path, we can still define its angular momentum relative to any reference point.
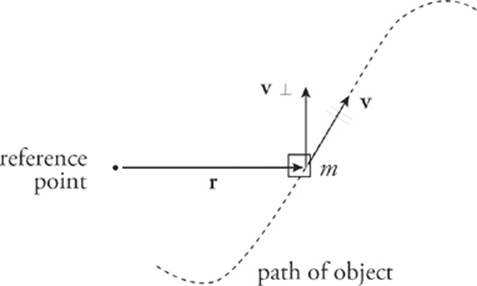
If r is the vector from the reference point to the mass, then the angular momentum is
L = rmv⊥
where v⊥ is the component of the velocity that”s perpendicular to r.
For a rotating object, the angular momentum equals the sum of the angular momentum of each individual particle. This can be written as L=Iω, where I is the object”s moment of inertia and ω is the angular velocity (to be discussed later). I is basically a measure of how difficult it is to start an object rotating (analogous to mass in the translational world). I increases with mass and average radius from the axis of rotation.