Advanced Calculus of Several Variables (1973)
Part II. Multivariable Differential Calculus
Chapter 7. TAYLOR'S FORMULA IN SEVERAL VARIABLES
Before generalizing Taylor's formula to higher dimensions, we need to discuss higher-order partial derivatives. Let f be a real-valued function defined on an open subset U of ![]() n. Then we say that f is of class
n. Then we say that f is of class ![]() on U if all iterated partial derivatives of f, of order at most k, exist and are continuous on U. More precisely, this means that, given any sequence i1, i2, . . . , iq, where q
on U if all iterated partial derivatives of f, of order at most k, exist and are continuous on U. More precisely, this means that, given any sequence i1, i2, . . . , iq, where q![]() k and each ij is one of the integers 1 through n, the iterated partial derivative
k and each ij is one of the integers 1 through n, the iterated partial derivative
![]()
exists and is continuous on U.
If this is the case, then it makes no difference in which order the partial derivatives are taken. That is, if i1′, i2′, . . . , iq′ is a permutation of the sequence i1, . . . , iq (meaning simply that each of the integers 1 through n occurs the same number of times in the two sequences), then
![]()
This fact follows by induction on q from see Theorem 3.6, which is the case q = 2 of this result (Exercise 7.1).
In particular, if for each r = 1, 2, . . . , n, jr is the number of times that r appears in the sequence i1, . . . , iq, then
![]()
If f is of class ![]() on U, and j1 + · · · + jn < k, then
on U, and j1 + · · · + jn < k, then ![]() is differentiable on U by Theorem 2.5. Therefore, given h = (h1, . . . , hn), its directional derivative with respect to h exists, with
is differentiable on U by Theorem 2.5. Therefore, given h = (h1, . . . , hn), its directional derivative with respect to h exists, with
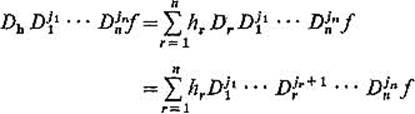
by Theorem 2.2 and the above remarks. It follows that the iterated directional derivative Dhk f = Dh · · · Dhf exists, with

the summation being taken over all n-tuples j1, . . . , jn of nonnegative integers whose sum is k. Here the symbol
![]()
denotes the “multinomial coefficient” appearing in the general multinomial formula
![]()
Actually
![]()
see Exercise 7.2.
For example, if n = 2 we have ordinary binomial coefficients and (1) gives
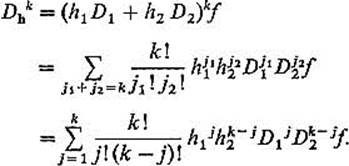
For instance, we obtain
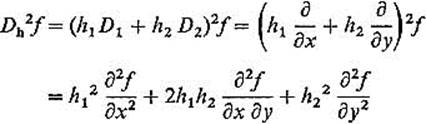
and
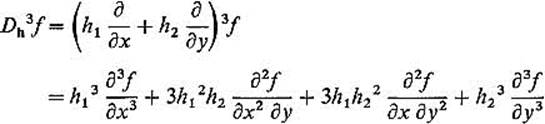
with k = 2 and k = 3, respectively.
These iterated directional derivatives are what we need to state the multidimensional Taylor‘s formula. To see why this should be, consider the 1-dimensional Taylor’s formula in the form
![]()
given in Theorem 6.1. Since f(r)(a)hr = hr D1r f(a) = (h D1)rf(a) = Dhf(a) by Theorem 2.2 with n = 1, so that Dh = hD1, (2) can be rewritten
![]()
where Dh0f(a) = f(a). But now (3) is a meaningful equation if f is a real-valued function on ![]() n. If f is of class
n. If f is of class ![]() in a neighborhood of a, then we see from Eq. (1) above that
in a neighborhood of a, then we see from Eq. (1) above that
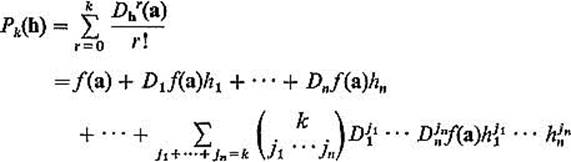
is a polynomial of degree at most k in the components h1, . . . , hn of h. Therefore Pk(h) is called the kth degree Taylor polynomial of f at a. The kth degree remainder of f at a is defined by
![]()
The notation Pk(h) and Rk(h) is incomplete, since it contains explicit reference to neither the function f nor the point a, but this will cause no confusion in what follows.
Theorem 7.1 (Taylor's Formula) If f is a real-valued function of class ![]() +1 on an open set containing the line segment L from a to a + h, then there exists a point
+1 on an open set containing the line segment L from a to a + h, then there exists a point ![]() such that
such that
![]()
so
![]()
PROOF If φ : ![]() is defined by
is defined by
![]()
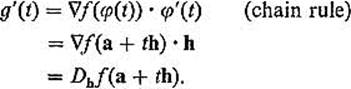
and g(t) = f(φ(t)) = f(a + th), then g(0) = f(a), g(1) = f(a + h), and Taylor's formula in one variable gives
![]()
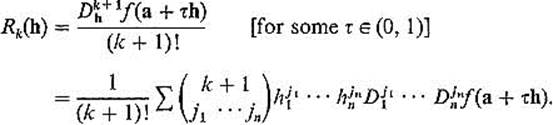
for some c![]() .(0,1) To complete the proof, it therefore suffices to show that
.(0,1) To complete the proof, it therefore suffices to show that
![]()
for r ![]() k+1, because then we have
k+1, because then we have
![]()
and ![]() with
with ![]() (see Fig. 2.38).
(see Fig. 2.38).
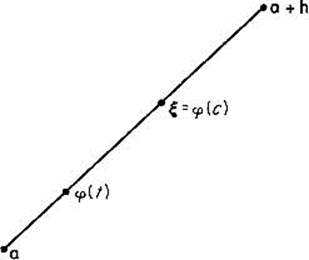
Figure 2.38
Actually, in order to apply the single-variable Taylor's formula, we need to know that g is of class ![]() +1 on [0, 1], but this will follow from (4) because f is of class
+1 on [0, 1], but this will follow from (4) because f is of class ![]() +1.
+1.
Note first that
Then assume inductively that (4) holds for r ![]() k
k![]() , and let f1(x) = Dhrf(x). Then g(r) = f1
, and let f1(x) = Dhrf(x). Then g(r) = f1 ![]() φ, so
φ, so
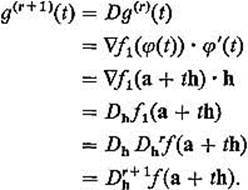
Thus (4) holds by induction for r ![]() k + 1 as desired.
k + 1 as desired.
![]()
If we write x = a + h, then we obtain
![]()
where Pk(x − a) is a kth degree polynomial in the components x1 − a1, x2 − a2, . . . , xn − an of h = x − a, and
![]()
for some ![]() .
.
Example 1 Let ![]() . Then each
. Then each ![]() , so
, so
Hence the kth degree Taylor polynomial of ![]() is
is
![]()
as expected.
Example 2 Suppose we want to expand f(x, y) = xy in powers of x − 1 and y − 1. Of course the result will be
![]()
but let us obtain this result by calculating the second degree Taylor polynomial P2(h) of f(x, y) at a = (1, 1) with h = (h1, h2) = (x − 1, y − 1). We will then have f(x, y) = P2(x − 1, y − 1), since R3(h) = 0 because all third order partial derivatives of f vanish. Now
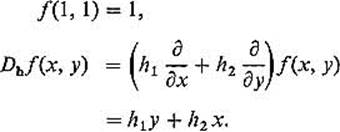
So Dhf(1, 1) = h1 + h2 = (x − 1) + (y − 1), and
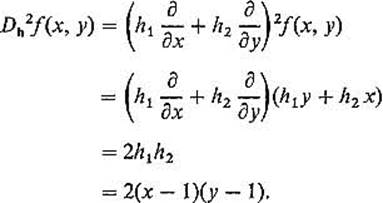
Hence

as predicted.
Next we generalize the error estimate of Corollary 6.2.
Corollary 7.2 If f is of class ![]() + 1 in a neighborhood U of a, and Rk(h) is the kth degree remainder of f at a, then
+ 1 in a neighborhood U of a, and Rk(h) is the kth degree remainder of f at a, then
![]()
PROOF If h is sufficiently small that the line segment from a to a + h lies in U, then Theorem 7.1 gives
But ![]() because f is of class
because f is of class ![]() + 1 It therefore suffices to see that
+ 1 It therefore suffices to see that
![]()
if j1 + · · · + jn = k + 1. But this is so because each ![]() , and there is one more factor in the numerator than in the denominator.
, and there is one more factor in the numerator than in the denominator.
![]()
Rewriting the conclusion of Corollary 7.2 in terms of the kth degree Taylor polynomial, we have
![]()
We shall see that this result characterizes Pk(x − a); that is, Pk(x − a) is the only kth degree polynomial in x1 − a1, . . . , xn − an satisfying condition (5).
Lemma 7.3 If Q(x) and Q*(x) are two kth degree polynomials in x1, . . . , xn such that
![]()
then Q = Q*.
PROOF Supposing to the contrary that Q ≠ Q*, let
![]()
where F(x) is the polynomial consisting of all those terms of the lowest degree l which actually appear in Q(x) − Q*(x), and G(x) consists of all those terms of degree higher than l.
Choose a fixed point b ≠ 0 such that F(b) ≠ 0. Since ![]() for t sufficiently small, we have
for t sufficiently small, we have
since each term of F is of degree l, while each term of G is of degree > l. This contradiction proves that Q = Q*.
![]()
We can now establish the converse to Corollary 7.2.
Theorem 7.4 If f : ![]() is of class
is of class ![]() +1 in a neighborhood of a, and Q is a polynomial of degree k such that
+1 in a neighborhood of a, and Q is a polynomial of degree k such that
![]()
then Q is the kth degree Taylor polynomial of f at a.
PROOF Since
![]()
by the triangle inequality, (5) and (6) imply that
![]()
Since Q and Pk are both kth degree polynomials, Lemma 7.3 gives Q = Pk as desired.
![]()
The above theorem can often be used to discover Taylor polynomials of a function when the explicit calculation of its derivatives is inconvenient. In order to verify that a given kth degree polynomial Q is the kth degree Taylor polynomial of the class ![]() +1 function f at a, we need only verify that Q satisfies condition (6).
+1 function f at a, we need only verify that Q satisfies condition (6).
Example 3 We calculate the third degree Taylor polynomial of ex sin x by multiplying together those of ex and sin x. We know that
![]()
where limx→0 R(x)/x3 = limx→0 ![]() (x)/x3 = 0. Hence
(x)/x3 = 0. Hence
![]()
where
![]()
Since it is clear that
![]()
it follows from Theorem 7.4 that ![]() is the third degree Taylor polynomial of ex sin x at 0.
is the third degree Taylor polynomial of ex sin x at 0.
Example 4 Recall that
![]()
If we substitute t = x and t = y, and multiply the results, we obtain
![]()
where
![]()
Since it is easily verified that
![]()
it follows from Theorem 7.4 that ![]() is the second degree Taylor polynomial of ex+y at (0, 0).
is the second degree Taylor polynomial of ex+y at (0, 0).
We shall next give a first application of Taylor polynomials to multivariable maximum-minimum problems. Given a critical point a for f : ![]() , we would like to have a criterion for determining whether f has a local maximum or a local minimum, or neither, at a. If f is of class
, we would like to have a criterion for determining whether f has a local maximum or a local minimum, or neither, at a. If f is of class ![]() in a neighborhood of a, we can write its second degree Taylor expansion in the form
in a neighborhood of a, we can write its second degree Taylor expansion in the form
![]()
where
![]()
and
![]()
If not all of the second partial derivatives of f vanish at a, then q(h) is a (non-trivial) homogeneous second degree polynomial in h1, . . . , hn of the form
![]()
and is called the quadratic form of f at the critical point a. Note that
Since h/![]() h
h![]() is a point of the unit sphere Sn−1 in
is a point of the unit sphere Sn−1 in ![]() n, it follows that the quadratic form q is completely determined by its values on Sn−1. As in the 2-dimensional case of Section 4, a quadratic form is called positive-definite(respectively negative-definite) if and only if it is positive (respectively negative) at every point of Sn−1 (and hence everywhere except 0), and is called nondefinite if it assumes both positive and negative values on Sn−1 (and hence in every neighborhood of 0).
n, it follows that the quadratic form q is completely determined by its values on Sn−1. As in the 2-dimensional case of Section 4, a quadratic form is called positive-definite(respectively negative-definite) if and only if it is positive (respectively negative) at every point of Sn−1 (and hence everywhere except 0), and is called nondefinite if it assumes both positive and negative values on Sn−1 (and hence in every neighborhood of 0).
For example, x2 + y2 is positive-definite and −x2 − y2 is negative-definite, while x2 − y2 and xy are nondefinite. Note that y2, regarded as a quadratic form in x and y whose coefficients of both x2 and xy are zero, is neither positive-definite nor negative-definite nor nondefinite (it is not negative anywhere, but is zero on the x-axis).
In the case n = 1, when f is a function of a single variable with critical point a, the quadratic form of f at a is simply
![]()
Note that q is positive-definite if f′(a) > 0, and is negative-definite if f′(a) < 0 (the nondefinite case cannot occur if n = 1). Therefore the “second derivative test” for a single-variable function states that f has a local minimum at a if its quadratic form q(h) at a is positive-definite, and a local maximum at a if q(h) is negative-definite. If f′(a) = 0, then q(h) = 0 is neither positive-definite nor negative-definite (nor nondefinite), and we cannot determine (without considering higher derivatives) the character of the critical point a. The following theorem is the multivariable generalization of the “second derivative test.”
Theorem 7.5 Let f be of class ![]() in a neighborhood of the critical point a. Then f has
in a neighborhood of the critical point a. Then f has
(a)a local minimum at a if its quadratic form q(h) is positive-definite,
(b)a local maximum at a if q(h) is negative-definite,
(c)neither if q(h) is nondefinite.
PROOF Since f(a + h) − f(a) = q(h) + R2(h), it suffices for (a) to find a Δ > 0 such that
![]()
Note that
![]()
Since ![]() is a closed and bounded set, q(h/
is a closed and bounded set, q(h/![]() h
h![]() ) attains a minimum value m, and m > 0 because q is positive-definite. Then
) attains a minimum value m, and m > 0 because q is positive-definite. Then
![]()
But limh→0 R2(h)/![]() h
h![]() 2 = 0, so there exists Δ > 0 such that
2 = 0, so there exists Δ > 0 such that
![]()
Then
![]()
as desired.
The proof for case (b) is similar.
If q(h) is nondefinite, choose two fixed points h1 and h2 in ![]() n such that q(h1) > 0 and q(h2) < 0. Then
n such that q(h1) > 0 and q(h2) < 0. Then
Since limt→0 R2(thi)/![]() thi
thi![]() 2 = 0, it follows that, for t sufficiently small, f(a + thi) − f(a) is positive if i = 1, and negative if i = 2. Hence f has neither a local minimum nor a local maximum at a.
2 = 0, it follows that, for t sufficiently small, f(a + thi) − f(a) is positive if i = 1, and negative if i = 2. Hence f has neither a local minimum nor a local maximum at a.
![]()
For example, suppose that a is a critical point of f(x, y). Then f has a local minimum at a if q(x, y) = x2 + y2, a local maximum at a if q(x, y) = −x2 − y2, and neither if q(x, y) = x2 − y2. If q(x, y) = y2 or q(x, y) = 0, then see Theorem 7.5 does not apply. In the cases where the theorem does apply, it says simply that the character of f at a is the same as that of q at 0 (Fig. 2.39).
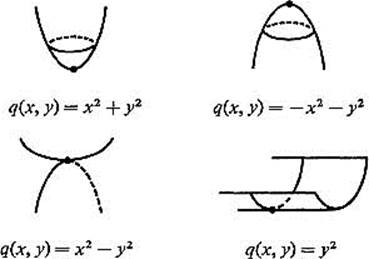
Figure 2.39
Example 5 Let f(x, y) = x2 + y2 + cos x. Then (0, 0) is a critical point of f. Since
![]()
Theorem 7.4 implies that the second degree Taylor polynomial of f at (0, 0) is
![]()
so the quadratic form of f at (0, 0) is
![]()
Since q(x, y) is obviously positive-definite, it follows from Theorem 7.5 that f has a local minimum at (0, 0).
Example 6 The point a = (2, π/2) is a critical point for the function f(x, y) = x2 sin y − 4x. Since
![]()
the second degree Taylor expansion of f at (2, π/2) is
![]()
Consequently the quadratic form of f at (2, π/2) is defined by
![]()
(writing q in terms of x and y through habit). Since q is clearly nondefinite, it follows from Theorem 7.5 that f has neither a local maximum nor a local minimum at (2, π/2).
Consequently, in order to determine the character of the critical point a of f, we need to maximize and minimize its quadratic form on the unit sphere Sn−1. This is a Lagrange multiplier problem with which we shall deal in the next section.
Exercises
7.1If f is a function of class ![]() , and i1′, . . . , iq′ is a permutation of i1, . . . , iq, prove by induction on q that
, and i1′, . . . , iq′ is a permutation of i1, . . . , iq, prove by induction on q that
![]()
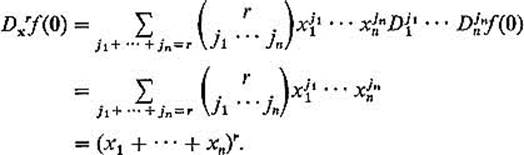
7.2Let f(x) = (x1 + · · · + xn)k.
(a)Show that ![]() .
.
(b)Show that
![]()
(c)Conclude that
![]()
7.3Find the third degree Taylor polynomial of f(x, y) = (x + y)3 at (0, 0) and (1, 1).
7.4Find the third degree Taylor polynomial of f(x, y, z) = xy2z3 at (1, 0, −1).
7.5Assuming the facts that the sixth degree Taylor polynomials of tan−1 x and sin2 x are
![]()
respectively, use Theorem 7.4 to show that the sixth degree Taylor polynomial of
![]()
at 0 is ![]() . Why does it now follow from Theorem 6.3 that f has a local minimum at 0?
. Why does it now follow from Theorem 6.3 that f has a local minimum at 0?
7.6Let f(x, y) = exy sin(x + y). Multiply the Taylor expansions
![]()
and
![]()
together, and apply Theorem 7.4 to show that
![]()
is the third degree Taylor polynomial of f at 0. Conclude that
7.7Apply Theorem 7.4 to prove that the Taylor polynomial of degree 4n + 1 for f(x) = sin(x2) at 0 is
![]()
Hint: sin x = P2n+1(x) + R2n+1(x), where
![]()
Hence limx→0 R2n+1(x2)/x4n+1 = 0.
7.8Apply Theorem 7.4 to show that the sixth degree Taylor polynomial of f(x) = sin2 x at 0 is ![]() .
.
7.9Apply Theorem 7.4 to prove that the kth degree Taylor polynomial of f(x)g(x) can be obtained by multiplying together those of f(x) and g(x), and then deleting from the product all terms of degree greater than k.
7.10Find and classify the critical points of ![]() .
.
7.11Classify the critical point (−1, π/2, 0) of f(x, y, z) = x sin z − z sin y.
7.12Use the Taylor expansions given in Exercises 7.5 and 7.6 to classify the critical point (0, 0, 0) of the function f(x, y, z) = x2 + y2 + exy − y tan−1 x + sin2 z.