Advanced Calculus of Several Variables (1973)
Part III. Successive Approximations and Implicit Functions
Chapter 4. MANIFOLDS IN Rn
We continue here the discussion of manifolds that was begun in Section II.5. Recall that a k-dimensional manifold in ![]() n is a set M that looks locally like the graph of a mapping from
n is a set M that looks locally like the graph of a mapping from ![]() k to
k to ![]() n−k. That is, every point of M lies in an open subset V of
n−k. That is, every point of M lies in an open subset V of ![]() n such that
n such that ![]() is a k-dimensional patch. Recall that this means there exists a permutation
is a k-dimensional patch. Recall that this means there exists a permutation ![]() of x1, . . . , xn, and a differentiable mapping h : U →
of x1, . . . , xn, and a differentiable mapping h : U → ![]() n−k defined on an open set
n−k defined on an open set ![]() , such that
, such that
![]()
see Fig. 3.9. We will call P a ![]() or smooth patch if the mapping h is
or smooth patch if the mapping h is ![]() . The manifold M will be called
. The manifold M will be called ![]() or smooth if it is a union of smooth patches.
or smooth if it is a union of smooth patches.
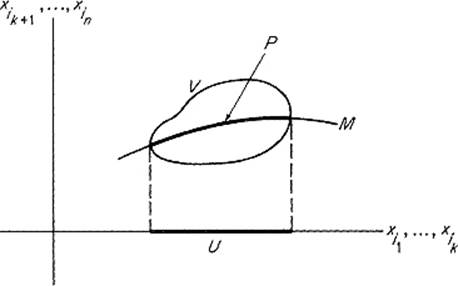
Figure 3.9
There are essentially three ways that a k-manifold in ![]() n can appear (locally):
n can appear (locally):
(a)as the graph of a mapping ![]() k →
k → ![]() n−k,
n−k,
(b)as the zero set of a mapping ![]() n →
n → ![]() n−k,
n−k,
(c)as the image of a mapping ![]() k →
k → ![]() n.
n.
The definition of a manifold is based on (a), which is actually a special case of both (b) and (c), since the graph of f: ![]() k →
k → ![]() n−k is the same as the zero set of G(x, y) = f(x) − y, and is also the image of F :
n−k is the same as the zero set of G(x, y) = f(x) − y, and is also the image of F : ![]() k →
k → ![]() n, where F(x) = (x, f(x)). We want to give conditions under which (b) and (c) are, in fact, equivalent to (a).
n, where F(x) = (x, f(x)). We want to give conditions under which (b) and (c) are, in fact, equivalent to (a).
Recall that our study of the Lagrange multiplier method in Section II.5 was based on the appearance of manifolds in guise (b). The following result was stated (without proof) in Theorem II.5.7.
Theorem 4.1 Let G : ![]() n →
n → ![]() m be a
m be a ![]() mapping, where k = n − m > 0. If M is the set of all those points
mapping, where k = n − m > 0. If M is the set of all those points ![]() for which the derivative matrix G′(x) has rank m, then M is a smooth k-manifold.
for which the derivative matrix G′(x) has rank m, then M is a smooth k-manifold.
PROOF We need to show that each point p of M lies in a smooth k-dimensional patch on M. By Theorem I.5.4, the fact, that the rank of the m × n matrix G′(p) is m, implies that some m of its column vectors are linearly independent. The column vectors of the matrix G′ are simply the partial derivative vectors ∂G/∂x1, . . . , ∂G/∂xn, and let us suppose we have rearranged the coordinates in ![]() n so that it is the last m of these partial derivative vectors that are linearly independent. If we write
n so that it is the last m of these partial derivative vectors that are linearly independent. If we write
![]()
where ![]() , then it follows that the partial derivative matrix D2G(p) is nonsingular.
, then it follows that the partial derivative matrix D2G(p) is nonsingular.
Consequently the implicit mapping theorem applies to provide us with a neighborhood V of p = (a, b) in ![]() n, a neighborhood U of a in
n, a neighborhood U of a in ![]() k, and a
k, and a ![]() mapping f : U →
mapping f : U → ![]() m such that y = f(x) solves the equation G(x, y) = 0 in V. Clearly the graph of f is the desired smooth k-dimensional patch.
m such that y = f(x) solves the equation G(x, y) = 0 in V. Clearly the graph of f is the desired smooth k-dimensional patch.
![]()
Thus conditions (a) and (b) are equivalent, subject to the rank hypothesis in Theorem 4.1.
When we study integration on manifolds in Chapter V, condition (c) will be the most important of the three. If M is a k-manifold in ![]() n, and U is an open subset of
n, and U is an open subset of ![]() k, then a one-to-one mapping φ : U → M can be regarded as a parametrization of the subset φ(U) of M. For example, the student is probably familiar with the spherical coordinates parametrization
k, then a one-to-one mapping φ : U → M can be regarded as a parametrization of the subset φ(U) of M. For example, the student is probably familiar with the spherical coordinates parametrization ![]() of the unit sphere
of the unit sphere ![]() , defined by
, defined by
![]()
The theorem below asserts that, if the subset M of ![]() n can be suitably parametrized by means of mappings from open subsets of
n can be suitably parametrized by means of mappings from open subsets of ![]() k to M, then M is a smooth k-manifold.
k to M, then M is a smooth k-manifold.
Let φ : U → ![]() n be a
n be a ![]() mapping defined on an open subset U of
mapping defined on an open subset U of ![]() . Then we call φ regular if the derivative matrix φ′(u) has maximal rank k, for each u ∈ U. According to the following theorem, a subset M of
. Then we call φ regular if the derivative matrix φ′(u) has maximal rank k, for each u ∈ U. According to the following theorem, a subset M of ![]() n is a smooth k-manifold if it is locally the image of a regular
n is a smooth k-manifold if it is locally the image of a regular ![]() mapping defined on an open subset of
mapping defined on an open subset of ![]() k.
k.
Theorem 4.2 Let M be a subset of ![]() n. Suppose that, given p ∈ M, there exists an open set
n. Suppose that, given p ∈ M, there exists an open set ![]() and a regular
and a regular ![]() mapping φ : U →
mapping φ : U → ![]() n such that
n such that ![]() , with φ(U′) being an open subset of M for each open set
, with φ(U′) being an open subset of M for each open set ![]() . Then M is a smooth k-manifold.
. Then M is a smooth k-manifold.
The statement that φ(U′) is an open subset of M means that there exists an open set W′ in ![]() n such that
n such that ![]() . The hypothesis that φ(U′) is open in M, for every open subset U′ of U, and not just for U itself, is necessary if the conclusion that M is a k-manifold is to follow. That this is true may be seen by considering a figure six in the plane—although it is not a 1-manifold (why?); there obviously exists a one-to-one regular mapping φ : (0, 1) →
. The hypothesis that φ(U′) is open in M, for every open subset U′ of U, and not just for U itself, is necessary if the conclusion that M is a k-manifold is to follow. That this is true may be seen by considering a figure six in the plane—although it is not a 1-manifold (why?); there obviously exists a one-to-one regular mapping φ : (0, 1) → ![]() 2 that traces out the figure six.
2 that traces out the figure six.
PROOF Given p ∈ M and φ : U → M as in the statement of the theorem, we want to show that p has a neighborhood (in ![]() n) whose intersection with M is a smooth k-dimensional patch. If φ(a) = p, then the n × k matrix φ′(a) has rank k. After relabeling coordinates in
n) whose intersection with M is a smooth k-dimensional patch. If φ(a) = p, then the n × k matrix φ′(a) has rank k. After relabeling coordinates in ![]() n if necessary, we may assume that the k × k submatrix consisting of the first k rows of φ′(a) is nonsingular.
n if necessary, we may assume that the k × k submatrix consisting of the first k rows of φ′(a) is nonsingular.
Write p = (b, c) with ![]() and
and ![]() , and let π :
, and let π : ![]() n →
n → ![]() k denote the projection onto the first k coordinates,
k denote the projection onto the first k coordinates,
![]()
If f : U → ![]() k is defined by
k is defined by
![]()
then f(a) = b, and the derivative matrix f′(a) is nonsingular, being simply the k × k submatrix of φ′(a) referred to above.
Consequently the inverse mapping theorem applies to give neighborhoods U′ of a and V′ of b such that f : U′ → V′ is one-to-one, and the inverse g : V′ → U′ is ![]() . Now define h : V′ →
. Now define h : V′ → ![]() n−k by
n−k by
![]()
Since the graph of h is P = φ(U′), and there exists (by hypothesis) an open set W′ in ![]() n with
n with ![]() , we see that p lies in a smooth k-dimensional patch on M, as desired.
, we see that p lies in a smooth k-dimensional patch on M, as desired.
![]()
REMARK Note that, in the above notation, the mapping
![]()
is a ![]() local inverse to φ. That is, Φ is a
local inverse to φ. That is, Φ is a ![]() mapping on the open subset W′ of
mapping on the open subset W′ of ![]() n, and Φ(x) = φ−1(x) for
n, and Φ(x) = φ−1(x) for ![]() . This fact will be used in the proof of Theorem 4.3 below.
. This fact will be used in the proof of Theorem 4.3 below.
If M is a smooth k-manifold, and φ : U → M satisfies the hypotheses of Theorem 4.2, then the mapping φ is called a coordinate patch for M provided that it is one-to-one. That is, a coordinate patch for M is a one-to-one regular ![]() mapping φ : U →
mapping φ : U → ![]() n defined on an open subset of
n defined on an open subset of ![]() k, such that φ(U′) is an open subset of M, for each open subset U′ of U.
k, such that φ(U′) is an open subset of M, for each open subset U′ of U.
Note that the “local graph” patches, on which we based the definition of a manifold, yield coordinate patches as follows. If M is a smooth k-manifold in ![]() n, and W is an open set such that
n, and W is an open set such that ![]() is the graph of the
is the graph of the ![]() mapping
mapping ![]() , then the mapping φ : U →
, then the mapping φ : U → ![]() n defined by φ(u) = (u, f(u)) is a coordinate patch for M. We leave it as exercise for the reader to verify this fact. At any rate, every smooth manifold M possesses an abundance of coordinate patches. In particular, every point of M lies in the image of some coordinate patch, so there exists a collection
n defined by φ(u) = (u, f(u)) is a coordinate patch for M. We leave it as exercise for the reader to verify this fact. At any rate, every smooth manifold M possesses an abundance of coordinate patches. In particular, every point of M lies in the image of some coordinate patch, so there exists a collection ![]() of coordinate patches for M such that
of coordinate patches for M such that
![]()
Uα being the domain of definition of φα. Such a collection of coordinate patches is called an atlas for M.
The most important fact about coordinate patches is that they overlap differentiably, in the sense of the following theorem (see Fig. 3.10).
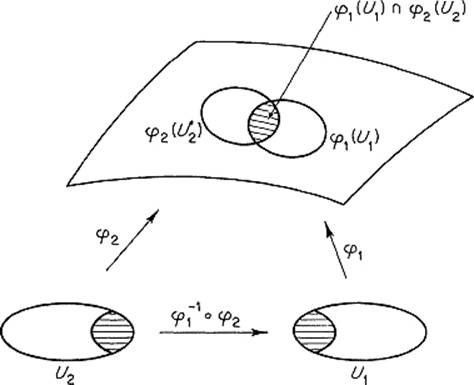
Figure 3.10
Theorem 4.3 Let M be a smooth k-manifold in ![]() n, and let φ1 : U1 → M and φ2 : U2 → M be two coordinate patches with
n, and let φ1 : U1 → M and φ2 : U2 → M be two coordinate patches with ![]() non-empty. Then the mapping
non-empty. Then the mapping
![]()
is continuously differentiable.
PROOF Given ![]() , the remark following the proof of Theorem 4.2 provides a
, the remark following the proof of Theorem 4.2 provides a ![]() local inverse Φ to φ1, defined on a neighborhood of p in
local inverse Φ to φ1, defined on a neighborhood of p in ![]() n. Then
n. Then ![]() agrees, in a neighborhood of the point
agrees, in a neighborhood of the point ![]() , with the composition Φ
, with the composition Φ ![]() φ2 of two
φ2 of two ![]() mappings.
mappings.
![]()
Now let ![]() be an atlas for the smooth k-manifold
be an atlas for the smooth k-manifold ![]() , and write
, and write
![]()
if ![]() is nonempty. Then Tij is a
is nonempty. Then Tij is a ![]() mapping by the above theorem, and has the
mapping by the above theorem, and has the ![]() inverse Tji. It follows from the chain rule that
inverse Tji. It follows from the chain rule that
![]()
so det T′ij(x) ≠ 0 wherever Tij is defined.
The smooth k-manifold M is called orientable if there exists an atlas {φi} for M such that each of the “change of coordinates” mappings Tij defined above has positive Jacobian determinant,
![]()
wherever it is defined. The pair (M, {φi}) is then called an oriented k-manifold.
Not every manifold can be oriented. The classical example of a nonorientable manifold is the Möbius strip, a model of which can be made by gluing together the ends of a strip of paper after given it a half twist. We will see the importance of orientability when we study integration on manifolds in Chapter V.
Exercises
4.1Let φ : U → ![]() n and ψ : V →
n and ψ : V → ![]() n be two coordinate patches for the smooth k-manifold M. Say that φ and ψ overlap positively (respectively negatively) if det(φ−1
n be two coordinate patches for the smooth k-manifold M. Say that φ and ψ overlap positively (respectively negatively) if det(φ−1 ![]() ψ)′ is positive (respectively negative) wherever defined. Now define ρ :
ψ)′ is positive (respectively negative) wherever defined. Now define ρ : ![]() k →
k → ![]() k by
k by
![]()
If φ and ψ overlap negatively, and ![]() = ψ
= ψ ![]() ρ : ρ−1(V) →
ρ : ρ−1(V) → ![]() n, prove that the coordinate neighborhoods φ and
n, prove that the coordinate neighborhoods φ and ![]() overlap positively.
overlap positively.
4.2Show that the unit sphere Sn−1 has an atlas consisting of just two coordinate patches. Conclude from the preceding exercise that Sn−1 is orientable.
4.3Let M be a smooth k-manifold in ![]() n. Given p ∈ M, show that there exists an open subset W of
n. Given p ∈ M, show that there exists an open subset W of ![]() n with p ∈ W, and a one-to-one
n with p ∈ W, and a one-to-one ![]() mapping f: W →
mapping f: W → ![]() n, such that
n, such that ![]() is an open subset of
is an open subset of ![]() .
.
4.4Let M be a smooth k-manifold in ![]() n, and N a smooth (k − 1)-manifold with
n, and N a smooth (k − 1)-manifold with ![]() . If φ : U → M is a coordinate patch such that
. If φ : U → M is a coordinate patch such that ![]() is nonempty, show that
is nonempty, show that ![]() is a smooth (k − 1)-manifold in
is a smooth (k − 1)-manifold in ![]() k. Conclude from the preceding exercise that, given p ∈ N, there exists a coordinate patch ψ : V → M with
k. Conclude from the preceding exercise that, given p ∈ N, there exists a coordinate patch ψ : V → M with ![]() , such that
, such that ![]() is an open subset of
is an open subset of ![]() .
.
4.5If U is an open subset of ![]() , and φ : U →
, and φ : U → ![]() 3 is a
3 is a ![]() mapping, show that φ is regular if and only if ∂φ/∂u × ∂φ/∂v ≠ 0 at each point of U. Conclude that φ is regular if and only if, at each point of U, at least one of the three Jacobian determinants
mapping, show that φ is regular if and only if ∂φ/∂u × ∂φ/∂v ≠ 0 at each point of U. Conclude that φ is regular if and only if, at each point of U, at least one of the three Jacobian determinants
![]()
is nonzero.
4.6The 2-manifold M in ![]() 3 is called two-sided if there exists a continuous mapping n : M →
3 is called two-sided if there exists a continuous mapping n : M → ![]() 3 such that, for each x ∈ M, the vector n(x) is perpendicular to the tangent plane Tx to M at x. Show that M is two-sided if it is orientable. Hint: If φ : U →
3 such that, for each x ∈ M, the vector n(x) is perpendicular to the tangent plane Tx to M at x. Show that M is two-sided if it is orientable. Hint: If φ : U → ![]() 3 is a coordinate patch for M, then ∂φ/∂u(u) × ∂φ/∂v(u) is perpendicular to Tφ(u). If φ : U →
3 is a coordinate patch for M, then ∂φ/∂u(u) × ∂φ/∂v(u) is perpendicular to Tφ(u). If φ : U → ![]() 3 and ψ : V →
3 and ψ : V → ![]() 3 are two coordinate patches for M that overlap positively, and u ∈ U and v ∈ V are points such that
3 are two coordinate patches for M that overlap positively, and u ∈ U and v ∈ V are points such that ![]() , show that the vectors
, show that the vectors
![]()
are positive multiples of each other.