Advanced Calculus of Several Variables (1973)
Part IV. Multiple Integrals
Chapters II and III were devoted to multivariable differential calculus. We turn now to a study of multivariable integral calculus.
The basic problem which motivates the theory of integration is that of calculating the volumes of sets in ![]() n. In particular, the integral of a continuous nonnegative, real-valued function f on an appropriate set
n. In particular, the integral of a continuous nonnegative, real-valued function f on an appropriate set ![]() is supposed to equal the volume of the region in
is supposed to equal the volume of the region in ![]() n+1 that lies over the set S and under the graph of f. Experience and intuition therefore suggest that a thorough discussion of multiple integrals will involve the definition of a function which associates with each “appropriate” set
n+1 that lies over the set S and under the graph of f. Experience and intuition therefore suggest that a thorough discussion of multiple integrals will involve the definition of a function which associates with each “appropriate” set ![]() a nonnegative real number v(A) called its volume, satisfying the following conditions (in which A and B are subsets of
a nonnegative real number v(A) called its volume, satisfying the following conditions (in which A and B are subsets of ![]() n whose volume is defined):
n whose volume is defined):
(a)If ![]() , then
, then ![]() .
.
(b)If A and B are nonoverlapping sets (meaning that their interiors are disjoint), then ![]() .
.
(c)If A and B are congruent sets (meaning that one can be carried onto the other by a rigid motion of ![]() n), then v(A) = v(B).
n), then v(A) = v(B).
(d)If I is a closed interval in ![]() n, that is, I = I1 × I2 × · · · × In where
n, that is, I = I1 × I2 × · · · × In where ![]() , then v(I) = (b1 − a1)(b2 − a2) · · · (bn − an).
, then v(I) = (b1 − a1)(b2 − a2) · · · (bn − an).
Conditions (a)–(d) are simply the natural properties that should follow from any reasonable definition of volume, if it is to agree with one's intuitive notion of “size” for subsets of ![]() n.
n.
In Section 1 we discuss the concept of volume, or “area,” for subsets of the plane ![]() 2, and apply it to the 1-dimensional integral. This will serve both as a review of introductory integral calculus, and as motivation for the treatment in Sections 2 and 3 of volume and the integral in
2, and apply it to the 1-dimensional integral. This will serve both as a review of introductory integral calculus, and as motivation for the treatment in Sections 2 and 3 of volume and the integral in ![]() n. Subsequent sections of the chapter are devoted to iterated integrals, change of variables in multiple integrals, and improper integrals.
n. Subsequent sections of the chapter are devoted to iterated integrals, change of variables in multiple integrals, and improper integrals.
Chapter 1. AREA AND THE 1-DIMENSIONAL INTEGRAL
The Greeks attempted to determine areas by what is called the “method of exhaustion.” Their basic idea was as follows: Given a set A whose area is to be determined, we inscribe in it a polygonal region whose area can easily be calculated (by breaking it up into nonoverlapping triangles, for instance). This should give an underestimate to the area of A. We then choose another polygonal region which more nearly fills up the set A, and therefore gives a better approximation to its area (Fig. 4.1). Continuing this process, we attempt to “exhaust”
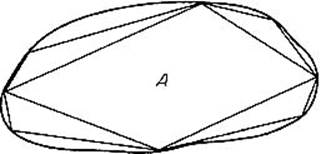
Figure 4.1
the set A with an increasing sequence of inscribed polygons, whose areas should converge to the area of the set A.
However, before attempting to determine or to measure area, we should say precisely what it is that we seek to determine. That is, we should start with a definition of area. The following definition is based on the idea of approximating both from within and from without, but using collections of rectangles instead of polygons. We start by defining the area a(R) of a rectangle R to be the product of the lengths of its base and height. Then, given a bounded set S in the plane ![]() 2, we say that its area is α if and only if, given ε > 0, there exist both
2, we say that its area is α if and only if, given ε > 0, there exist both
(1)a finite collection R1′, . . . , Rk′ of nonoverlapping rectangles, each contained in S, with ![]() (Fig. 4.2a),
(Fig. 4.2a),
and
(2)A finite collection R1″, . . . , Rl″ of rectangles which together contain S, with ![]() (Fig. 4.2b).
(Fig. 4.2b).
If there exists no such number α, then we say that the set S does not have area, or that its area is not defined.
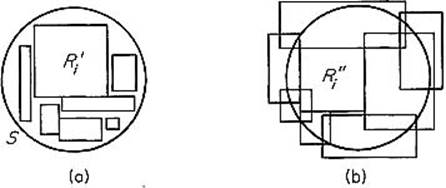
Figure 4.2
Example 1Not every set has area. For instance, if
![]()
then S contains no (nondegenerate) rectangle. Hence ![]() and
and ![]() for any two collections as above (why?). Thus no number α satisfies the definition (why?).
for any two collections as above (why?). Thus no number α satisfies the definition (why?).
Example 2We verify that the area of a triangle of base b and height a is ![]() . First subdivide the base [0, b] into n equal subintervals, each of length b/n. See Fig. 4.3. Let Rk′ denote the rectangle with height (k − 1)a/n and base [(k− 1)b/n, kb/n], and Rk″ the rectangle with base [(k − 1)b/n, kb/n] and height ka/n. Then the sum of the areas of the inscribed rectangles is
. First subdivide the base [0, b] into n equal subintervals, each of length b/n. See Fig. 4.3. Let Rk′ denote the rectangle with height (k − 1)a/n and base [(k− 1)b/n, kb/n], and Rk″ the rectangle with base [(k − 1)b/n, kb/n] and height ka/n. Then the sum of the areas of the inscribed rectangles is
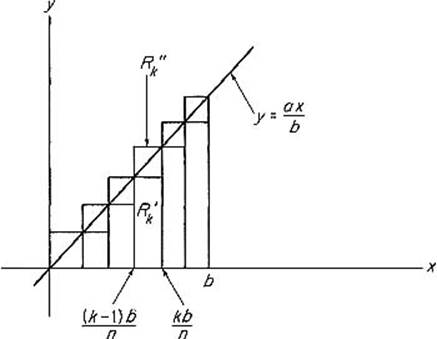
Figure 4.3
while the sum of the areas of the circumscribed rectangles is
Hence let ![]() . Then, given ε > 0, we can satisfy conditions (1) and (2) of the definition by choosing n so large that ab/2n < ε.
. Then, given ε > 0, we can satisfy conditions (1) and (2) of the definition by choosing n so large that ab/2n < ε.
We can regard area as a nonnegative valued function a : ![]() →
→ ![]() , where
, where ![]() is the collection of all those subsets of
is the collection of all those subsets of ![]() 2 which have area. We shall defer a systematic study of area until Section 2, where Properties A–E below will be verified. In the remainder of this section, we will employ these properties of area to develop the theory of the integral of a continuous function of one variable.
2 which have area. We shall defer a systematic study of area until Section 2, where Properties A–E below will be verified. In the remainder of this section, we will employ these properties of area to develop the theory of the integral of a continuous function of one variable.
AIf S and T have area and ![]() , then
, then ![]() (see Exercise 1.3 below).
(see Exercise 1.3 below).
BIf S and T are two nonoverlapping sets which have area, then so does ![]() , and
, and ![]() .
.
CIf S and T are two congruent sets and S has area, then so does T, and a(S) = a(T).
DIf R is a rectangle, then a(R) = the product of its base and height (obvious from the definition).
EIf ![]() where f is a continuous nonnegative function on [a, b], then S has area.
where f is a continuous nonnegative function on [a, b], then S has area.
We now define the integral ![]() of a continuous function f: [a, b] →
of a continuous function f: [a, b] → ![]() . Suppose first that f is nonnegative on [a, b], and consider the “ordinate set”
. Suppose first that f is nonnegative on [a, b], and consider the “ordinate set”
![]()
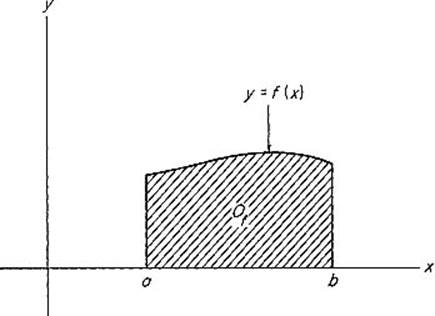
Figure 4.4
pictured in Fig. 4.4. Property E simply says that ![]() has area. We define the integral of the nonnegative continuous function f: [a, b] →
has area. We define the integral of the nonnegative continuous function f: [a, b] → ![]() by
by
![]()
the area of its ordinate set. Notice that, if ![]() on [a, b], then
on [a, b], then
![]()
by Properties A and D (see Fig. 4.5a), while
![]()
if ![]() by property B (see Fig. 4.5b).
by property B (see Fig. 4.5b).
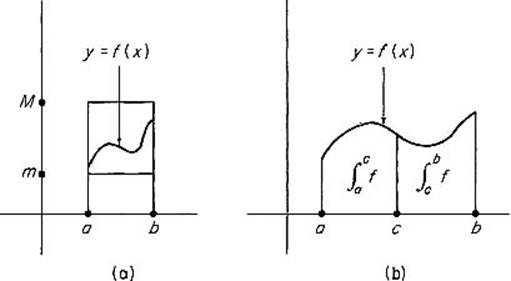
Figure 4.5
If f is an arbitrary continuous function on [a, b], we consider its positive and negative parts f+ and f−, defined on [a, b] by
![]()
and
![]()
Notice that f = f+ − f−, and that f+ and f− are both nonnegative functions. Also the continuity of f implies that of f+ and f− (Exercise 1.4). We can therefore define the integral of f on [a, b] by
![]()
In short, ![]() is “the area above the x-axis minus the area below the x-axis” (see Fig. 4.6). We first verify that (1) and (2) above hold for arbitrary continuous functions.
is “the area above the x-axis minus the area below the x-axis” (see Fig. 4.6). We first verify that (1) and (2) above hold for arbitrary continuous functions.
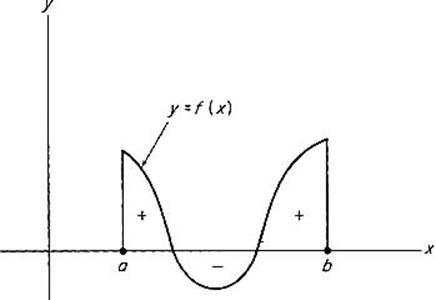
Figure 4.6
Lemma 1.1If ![]() , then
, then
![]()
PROOFThis is true for f because it is true for both f+ and f−:
Lemma 1.2If ![]() on [a, b], then
on [a, b], then
![]()
PROOFWe shall show that ![]() the proof that
the proof that ![]() is similar and is left as an exercise.
is similar and is left as an exercise.
Suppose first that M > 0. Then
![]()
because ![]() on [a, b], so that
on [a, b], so that ![]() is contained in the rectangle with base [a, b] and height M (Fig. 4.7).
is contained in the rectangle with base [a, b] and height M (Fig. 4.7).
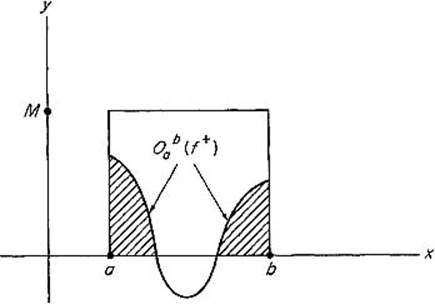
Figure 4.7
If ![]() , then
, then ![]() , so f+(x) = 0, f−(x) = −f(x) on [a, b], and
, so f+(x) = 0, f−(x) = −f(x) on [a, b], and ![]() . Hence
. Hence
![]()
because ![]() contains the rectangle of height −M.
contains the rectangle of height −M.
![]()
Lemmas 1.1 and 1.2 provide the only properties of the integral that are needed to prove the fundamental theorem of calculus.
Theorem 1.3If f : [a, b] → ![]() is continuous, and F: [a, b] →
is continuous, and F: [a, b] → ![]() is defined by
is defined by ![]() , then F is differentiable, with F′ = f.
, then F is differentiable, with F′ = f.
PROOFDenote by m(h) and M(h) the minimum and maximum values respectively of f on [x, x + h]. Then
![]()
by Lemma 1.1, and
![]()
by Lemma 1.2, so
![]()
Since limh→0 m(h) = limh→0 M(h) = f(x) because f is continuous at x, it follows from (3) that
![]()
as desired.
![]()
The usual method of computing integrals follows immediately from the fundamental theorem.
Corollary 1.4If f is continuous and G′ = f on [a, b], then
![]()
PROOFIf ![]() on [a, b], then
on [a, b], then
![]()
by the fundamental theorem. Hence
![]()
Now ![]() , so
, so
![]()
It also follows quickly from the fundamental theorem that integration is a linear operation.
Theorem 1.5If the functions f and g are continuous on [a, b], and ![]() , then
, then
![]()
PROOFLet F and G be antiderivatives of f and g, respectively (provided by the fundamental theorem), and let H = F + G on [a, b]. Then H′ = (F + G)′ = F′ + G′ = f + g, so
The proof that ![]() is similar.
is similar.
![]()
Theorem 1.6If ![]() on [a, b], then
on [a, b], then
![]()
PROOFSince ![]() , Theorem 1.5 and Lemma 1.2 immediately give
, Theorem 1.5 and Lemma 1.2 immediately give
![]()
Applying Theorem 1.6 with g = ![]() f
f![]() , we see that
, we see that
![]()
if ![]() on [a, b].
on [a, b].
It is often convenient to write
![]()
and we do this in the following two familiar theorems on techniques of integration.
Theorem 1.7(Substitution) Let f have a continuous derivative on [a, b], and let g be continuous on [c, d], where ![]() . Then
. Then
![]()
PROOFLet G be an antiderivative of g on [c, d]. Then
![]()
by the chain rule, so
Example 3Using the substitution rule, we can give a quick proof that the area of a circle of radius r is indeed A = πr2. Since π is by definition the area of the unit circle, we have (see Fig. 4.8)
![]()
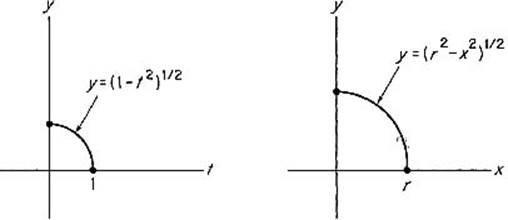
Figure 4.8
Then

Theorem 1.8(Integration by Parts) If f and g are continuously differentiable on [a, b], then
![]()
PROOF
![]()
or
![]()
so

The integration by parts formula takes the familiar and memorable form
![]()
if we write u = f(x), v = g(x), and further agree to the notation du = f′(x) dx, dv = g′(x) dx in the integrands.
Exercises
1.1Calculate the area under y = x2 over the interval [0, 1] by making direct use of the definition of area.
1.2Apply the fundamental theorem to calculate the area in the previous exercise.
1.3Prove Property A of area. Hint: Given ![]() , suppose to the contrary that a(T) < a(S), and let
, suppose to the contrary that a(T) < a(S), and let ![]() . Show that you have a contradiction, assuming (as you may) that, if the rectangles R1″, . . . , Rm″ together contain the rectangles R1′, . . . , Rn′, then
. Show that you have a contradiction, assuming (as you may) that, if the rectangles R1″, . . . , Rm″ together contain the rectangles R1′, . . . , Rn′, then ![]() .
.
1.4Prove that the positive and negative parts of a continuous function are continuous.
1.5If f is continuous on [a, b], and
![]()
prove that G′(x) = −f(x) on [a, b]. (See the proof of the fundamental theorem.)
1.6Prove the other part of Theorem 1.5, that is, that ![]() if c is a constant.
if c is a constant.
1.7Use integration by parts to establish the “reduction formula”
![]()
In particular, ![]() .
.
1.8Use the formula in Exercise 1.7 to show by mathematical induction that
![]()
and
![]()
1.9(a)Conclude from the previous exercise that
![]()
(b)Use the inequality
![]()
and the first formula in Exercise 1.8 to show that
![]()
(c)Conclude from (a) and (b) that
![]()
This result is usually written as an “infinite product,” known as Wallis' product:
![]()
1.10Deduce from Wallis' product that
![]()
Hint: Multiply and divide the right-hand side of
![]()
by 2 · 2 · 4 · 4 · · · · · (2n) · (2n). This yields
![]()
1.11Write ![]() for each n, thereby defining the sequence
for each n, thereby defining the sequence ![]() . Assuming that limn → ∞ an = a ≠ 0, deduce from the previous problem that a = (2π)1/2. Hence n! and (2πn)1/2(n/e)n are asymptotic as n → ∞,
. Assuming that limn → ∞ an = a ≠ 0, deduce from the previous problem that a = (2π)1/2. Hence n! and (2πn)1/2(n/e)n are asymptotic as n → ∞,
![]()
meaning that the limit of their ratio is 1. This is a weak form of “Stirling's formula.”