Advanced Calculus of Several Variables (1973)
Part V. Line and Surface Integrals; Differential Forms and Stokes' Theorem
This chapter is an exposition of the machinery that is necessary for the statement, proof, and application of Stokes’ theorem. Stokes’ theorem is a multidimensional generalization of the fundamental theorem of (single-variable) calculus, and may accurately be called the “fundamental theorem of multi-variable calculus.” Among its numerous applications are the classical theorems of vector analysis (see Section 7) .
We will be concerned with the integration of appropriate kinds of functions over surfaces (or manifolds) in ![]() n. It turns out that the sort of “object,” which can be integrated over a smooth k-manifold in
n. It turns out that the sort of “object,” which can be integrated over a smooth k-manifold in ![]() n, is what is called a differential k-form (defined in Section 5) . It happens that to every differential k-form α, there corresponds a differential (k + 1)-form dα, the differential of α, and Stokes' theorem is the formula
n, is what is called a differential k-form (defined in Section 5) . It happens that to every differential k-form α, there corresponds a differential (k + 1)-form dα, the differential of α, and Stokes' theorem is the formula
![]()
where V is a compact (k + 1)-dimensional manifold with nonempty boundary ∂V (a k-manifold). In the course of our discussion we will make clear the way in which this is a proper generalization of the fundamental theorem of calculus in the form
![]()
We start in Section 1 with the simplest case—integrals over curves in space, traditionally called “line integrals.” Section 2 is a leisurely treatment of the 2-dimensional special case of Stokes’ theorem, known as Green’s theorem; this will serve to prepare the student for the proof of the general Stokes' theorem in Section 6.
Section 3 includes the multilinear algebra that is needed for the subsequent discussions of surface area (Section 4) and differential forms (Section 5) . The student may prefer (at least in the first reading) to omit the proofs in Section 3 —only the definitions and statements of the theorems of this section are needed in the sequel.
Chapter 1. PATHLENGTH AND LINE INTEGRALS
In this section we generalize the familiar single-variable integral (on a closed interval in ![]() ) so as to obtain a type of integral that is associated with paths in
) so as to obtain a type of integral that is associated with paths in ![]() n. By a
n. By a ![]() path in
path in ![]() n is meant a continuously differentiable function γ: [a, b] →
n is meant a continuously differentiable function γ: [a, b] → ![]() n. The
n. The ![]() path γ : [a, b] →
path γ : [a, b] → ![]() n is said to be smooth if γ′(t) ≠ 0 for all
n is said to be smooth if γ′(t) ≠ 0 for all ![]() . The significance of the condition γ′(t) ≠ 0—that the direction of a
. The significance of the condition γ′(t) ≠ 0—that the direction of a ![]() path cannot change abruptly if its velocity vector never vanishes—is indicated by the following example.
path cannot change abruptly if its velocity vector never vanishes—is indicated by the following example.
Example 1 Consider the ![]() path γ = (γ1, γ2):
path γ = (γ1, γ2): ![]() →
→ ![]() 2 defined by
2 defined by
![]()
The image of γ is the graph y = ![]() x
x![]() (Fig. 5.1) . The only “corner” occurs at the origin, which is the image of the single point t = 0 at which γ′(t) = 0.
(Fig. 5.1) . The only “corner” occurs at the origin, which is the image of the single point t = 0 at which γ′(t) = 0.
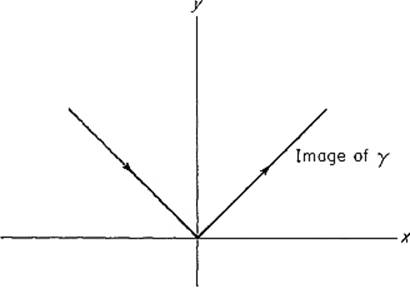
Figure 5.1
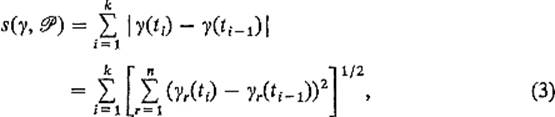
We discuss first the concept of length for paths. It is natural to approach the definition of the length s(γ) of the path γ : [a, b] → ![]() n by means of polygonal approximations to γ. Choose a partition
n by means of polygonal approximations to γ. Choose a partition ![]() of [a, b],
of [a, b],
![]()
and recall that the mesh ![]()
![]()
![]() is the maximum length ti − ti−1 of a subinterval of
is the maximum length ti − ti−1 of a subinterval of ![]() . Then
. Then ![]() defines a polygonal approximation to γ, namely the polygonal arc from γ(a) to γ(b) having successive vertices γ(t0), γ(t1), . . . , γ(tk) (Fig. 5.2) , and we regard the length
defines a polygonal approximation to γ, namely the polygonal arc from γ(a) to γ(b) having successive vertices γ(t0), γ(t1), . . . , γ(tk) (Fig. 5.2) , and we regard the length
![]()
of this polygonal arc as an approximation to s(γ).
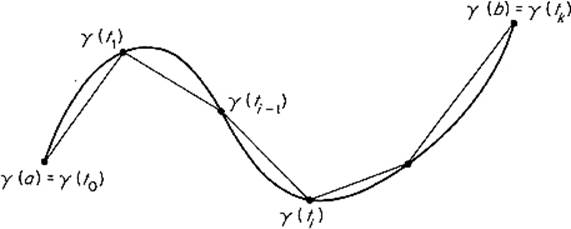
Figure 5.2
This motivates us to define the length s(γ) of the path γ : [a, b] → ![]() n by
n by
![]()
provided that this limit exists, in the sense that, given ![]() > 0, there exists δ > 0 such that
> 0, there exists δ > 0 such that
![]()
It turns out that the limit in (1) may not exist if γ is only assumed to be continuous, but that it does exist if γ is a ![]() path, and moreover that there is then a pleasant means of computing it.
path, and moreover that there is then a pleasant means of computing it.
Theorem 1.1 If γ : [a, b] → ![]() n is a
n is a ![]() path, then s(γ) exists, and
path, then s(γ) exists, and
![]()
REMARK If we think of a moving particle in ![]() n, whose position vector at time t is γ(t), then
n, whose position vector at time t is γ(t), then ![]() γ′(t)
γ′(t)![]() is its speed. Thus (2) simply asserts that the distance traveled by the particle is equal to the time integral of its speed—a result whose 1-dimensional case is probably familiar from elementary calculus.
is its speed. Thus (2) simply asserts that the distance traveled by the particle is equal to the time integral of its speed—a result whose 1-dimensional case is probably familiar from elementary calculus.
PROOF It suffices to show that, given ![]() > 0, there exists δ > 0 such that
> 0, there exists δ > 0 such that
![]()
for every partition
![]()
of mesh less than δ. Recall that
where γ1, . . . , γn are the component functions of γ.
An application of the mean value theorem to the function γr on the ith subinterval [ti−1, ti] yields a point ![]() such that
such that
![]()
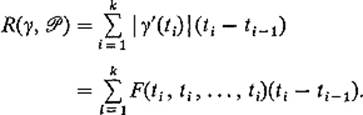
Consequently Eq. (3) becomes
![]()
If the points ti1, ti2, . . . , tin just happened to all be the same point ![]()
![]() , then (4) would take the form
, then (4) would take the form
![]()
which is a Riemann sum for ![]() . This is the real reason for the validity of formula (2) ; the remainder of the proof consists in showing that the difference between the sum (4) and an actual Riemann sum is “negligible.”
. This is the real reason for the validity of formula (2) ; the remainder of the proof consists in showing that the difference between the sum (4) and an actual Riemann sum is “negligible.”
For this purpose we introduce the auxiliary function F : I = [a, b]n → ![]() defined by
defined by
![]()
Notice that F(t, t, . . . , t) = ![]() γ′(t)
γ′(t)![]() , and that F is continuous, and therefore uniformly continuous, on the n-dimensional interval I, since γ is a
, and that F is continuous, and therefore uniformly continuous, on the n-dimensional interval I, since γ is a ![]() path. Consequently there exists a δ1 > 0 such that
path. Consequently there exists a δ1 > 0 such that
![]()
if each ![]() xr − yr
xr − yr![]() < δ1.
< δ1.
We now want to compare the approximation
![]()
with the Riemann sum
Since the points ti1, ti2, . . . , tin all lie in the interval [ti−1, ti], whose length ![]() , it follows from (5) that
, it follows from (5) that

if ![]()
![]()
![]() < δ1.
< δ1.
On the other hand, there exists (by Theorem IV.3.4) a δ2 > 0 such that
![]()
if ![]()
![]()
![]() < δ2.
< δ2.
If, finally, δ = min(δ1, δ2), then ![]()
![]()
![]() < δ implies that
< δ implies that

as desired.
![]()
Example 2 Writing γ(t) = (x1(t), . . . , xn(t)), and using Leibniz notation, formula (2) becomes
![]()
Given a ![]() function f : [a, b] →
function f : [a, b] → ![]() , the graph of f is the image of the
, the graph of f is the image of the ![]() path γ : [a, b] →
path γ : [a, b] → ![]() 2 defined by γ(x) = (x, f(x)). Substituting x1 = t = x and x2 = y in the above formula with n = 2, we obtain the familiar formula
2 defined by γ(x) = (x, f(x)). Substituting x1 = t = x and x2 = y in the above formula with n = 2, we obtain the familiar formula
![]()
for the length of the graph of a function.
Having defined pathlength and established its existence for ![]() paths, the following question presents itself. Suppose that α : [a, b] →
paths, the following question presents itself. Suppose that α : [a, b] → ![]() n and β : [c, d] →
n and β : [c, d] → ![]() n are two
n are two ![]() paths that are “geometrically equivalent” in the sense that they have the same initial point α(a) = β(c), the same terminal point α(b) = β(d), and trace through the same intermediate points in the same order. Do α and β then have the same length, s(α) = s(β)?
paths that are “geometrically equivalent” in the sense that they have the same initial point α(a) = β(c), the same terminal point α(b) = β(d), and trace through the same intermediate points in the same order. Do α and β then have the same length, s(α) = s(β)?
Before providing the expected affirmative answer to this question, we must make precise the notion of equivalence of paths. We say that the path α : [a, b] → ![]() n is equivalent to the path β : [c, d] →
n is equivalent to the path β : [c, d] → ![]() n if and only if there exists a
n if and only if there exists a ![]() function
function
![]()
such that φ([a, b]) = [c, d], α = β ![]() φ, and φ′(t) > 0 for all
φ, and φ′(t) > 0 for all ![]() (see Fig. 5.3) . The student should show that this relation is symmetric (if α is equivalent to β, then β is equivalent to α) and transitive (if α is equivalent to β, and βis equivalent to γ, then α is equivalent to γ), and is therefore an equivalence relation (Exercise 1.1) . He should also show that, if the
(see Fig. 5.3) . The student should show that this relation is symmetric (if α is equivalent to β, then β is equivalent to α) and transitive (if α is equivalent to β, and βis equivalent to γ, then α is equivalent to γ), and is therefore an equivalence relation (Exercise 1.1) . He should also show that, if the ![]() paths α and β are equivalent, then α is smooth if and only if β is smooth (Exercise 1.2) .
paths α and β are equivalent, then α is smooth if and only if β is smooth (Exercise 1.2) .
The fact that s(α) = s(β) if α and β are equivalent is seen by taking f(x) ≡ 1 in the following theorem.
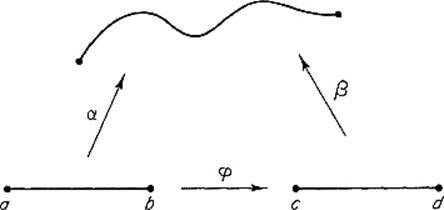
Figure 5.3
Theorem 1.2 Suppose that α : [a, b] → ![]() n and β : [c, d] →
n and β : [c, d] → ![]() n are equivalent
n are equivalent ![]() paths, and that f is a continuous real-valued function whose domain of definition in
paths, and that f is a continuous real-valued function whose domain of definition in ![]() n contains the common image of α and β. Then
n contains the common image of α and β. Then
![]()
PROOF If φ : [a, b] → [c, d] is a ![]() function such that α = β
function such that α = β ![]() φ and φ′(t) > 0 for all
φ and φ′(t) > 0 for all ![]() , then
, then
![]()
To provide a physical interpretation of integrals such as those of the previous theorem, let us think of a wire which coincides with the image of the ![]() path γ : [a, b] →
path γ : [a, b] → ![]() n, and whose density at the point γ(t) is f(γ(t)). Given a partition
n, and whose density at the point γ(t) is f(γ(t)). Given a partition ![]() = {a = t0 < t1 < · · · < tk = b} of [a, b], the sum
= {a = t0 < t1 < · · · < tk = b} of [a, b], the sum
![]()
may be regarded as an approximation to the mass of the wire. By an argument essentially identical to that of the proof of Theorem 1.1 , it can be proved that
![]()
Consequently this integral is taken as the definition of the mass of the wire.
If γ is a smooth path, the integral (6) can be interpreted as an integral with respect to pathlength. For this we need an equivalent unit-speed path, that is an equivalent smooth path ![]() such that
such that ![]()
![]() ′(t)
′(t)![]() ≡ 1.
≡ 1.
Proposition 1.3 Every smooth path γ : [a, b] → ![]() n is equivalent to a smooth unit-speed path.
n is equivalent to a smooth unit-speed path.
PROOF Write L = s(γ) for the length of γ, and define σ : [a, b] → [0, L] by
![]()
so σ(t) is simply the length of the path γ : [a, t] → ![]() n (Fig. 5.4) . Then from the fundamental theorem of calculus we see that σ is a
n (Fig. 5.4) . Then from the fundamental theorem of calculus we see that σ is a ![]() function with
function with
![]()
Therefore the inverse function τ : [0, L] → [a, b] exists, with
![]()
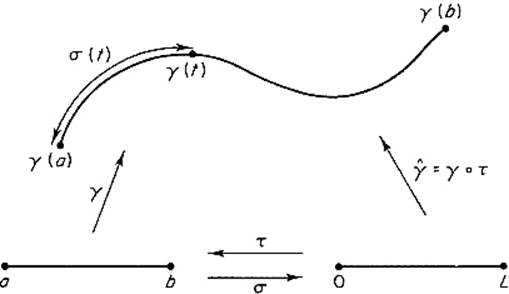
Figure 5.4
If ![]() : [0, L] →
: [0, L] → ![]() n is the equivalent smooth path defined by
n is the equivalent smooth path defined by ![]() = γ
= γ ![]() τ, the chain rule gives
τ, the chain rule gives
![]()
since σ′(t) = ![]() γ′(t)
γ′(t)![]() .
.
![]()
With the notation of this proposition and its proof, we have
since ![]()
![]() ′(σ(t))
′(σ(t))![]() = 1 and σ′(t) > 0. Substituting s = σ(t), we then obtain
= 1 and σ′(t) > 0. Substituting s = σ(t), we then obtain
![]()
This result also follows immediately from (Theorem 1.2. ) Since ![]() (s) simply denotes that point whose “distance along the path” from the initial point γ(a) is s, Eq. (7) provides the promised integral with respect to pathlength.
(s) simply denotes that point whose “distance along the path” from the initial point γ(a) is s, Eq. (7) provides the promised integral with respect to pathlength.
It also serves to motivate the common abbreviation
![]()
Historically this notation resulted from the expression
![]()
for the length of the “infinitesimal” piece of path corresponding to the “infinitesimal” time interval [t, t + dt]. Later in this section we will provide the expression ds = ![]() γ′(t)
γ′(t)![]() dt with an actual mathematical meaning (in contrast to its “mythical” meaning here).
dt with an actual mathematical meaning (in contrast to its “mythical” meaning here).
Now let γ : [a, b] → ![]() n be a smooth path, and think of γ(t) as the position vector of a particle moving in
n be a smooth path, and think of γ(t) as the position vector of a particle moving in ![]() n under the influence of the continuous force field F :
n under the influence of the continuous force field F : ![]() n →
n → ![]() n [so F(γ(t)) is the force acting on the particle at time t]. We inquire as to the work W done by the force field in moving the particle along the path from γ(a) to γ(b). Let
n [so F(γ(t)) is the force acting on the particle at time t]. We inquire as to the work W done by the force field in moving the particle along the path from γ(a) to γ(b). Let ![]() be the usual partition of [a, b]. If F were a constant force field, then the work done by F in moving the particle along the straight line segment from γ(ti−1) to γ(ti) would by definition be F · (γ(ti) − γ(ti−1)) (in the constant case, work is simply the product of force and distance). We therefore regard the sum
be the usual partition of [a, b]. If F were a constant force field, then the work done by F in moving the particle along the straight line segment from γ(ti−1) to γ(ti) would by definition be F · (γ(ti) − γ(ti−1)) (in the constant case, work is simply the product of force and distance). We therefore regard the sum
![]()
as an approximation to W. By an argument similar to the proof of Theorem 1.1 , it can be proved that
![]()
so we define the work done by the force field F in moving a particle along the path γ by
![]()
Rewriting (9) in terms of the unit tangent vector
![]()
at γ(t) (Fig. 5.5) , we obtain
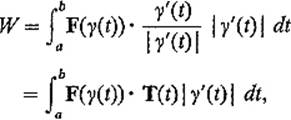
or
![]()
in the notation of (8) . Thus the work done by the force field is the integral with respect to pathlength of its “tangential component” F · T.

Figure 5.5
In terms of components, (9) becomes
![]()
or
![]()
in Leibniz notation. A classical abbreviation for this last formula is
![]()
This type of integral, called a line integral (or curvilinear integral), can of course be defined without reference to the above discussion of work, and indeed line integrals have a much wider range of applications than this. Given a ![]() path γ : [a, b] →
path γ : [a, b] → ![]() n and n continuous functions f1, . . . , fn whose domains of definition in
n and n continuous functions f1, . . . , fn whose domains of definition in ![]() n all contain the image of γ, the line integral ∫γ f1 dx1 + · · · + fn dxn is defined by
n all contain the image of γ, the line integral ∫γ f1 dx1 + · · · + fn dxn is defined by
![]()
Formally, we simply substitute xi = γi(t), dxi = γi′(t) dt into the left-hand side of (11) , and then integrate from a to b.
We now provide an interpretation of (11) whose viewpoint is basic to subsequent sections. By a (linear) differential form on the set ![]() is meant a mapping ω which associates with each point
is meant a mapping ω which associates with each point ![]() a linear function ω(x) :
a linear function ω(x) : ![]() n →
n → ![]() . Thus
. Thus
![]()
where ![]() (
(![]() n,
n, ![]() ) is the vector space of all linear (real-valued) functions on
) is the vector space of all linear (real-valued) functions on ![]() n. We will frequently find it convenient to write
n. We will frequently find it convenient to write
![]()
Recall that every linear function L : ![]() n →
n → ![]() is of the form
is of the form
![]()
where λi : ![]() n →
n → ![]() is the ith projection function defined by
is the ith projection function defined by
![]()
If we use the customary notation λi = dxi, then (12) becomes
![]()
If L = ω(x) depends upon the point ![]() , then so do the coefficients a1, . . . , an; this gives the following result.
, then so do the coefficients a1, . . . , an; this gives the following result.
Proposition 1.4 If ω is a differential form on ![]() , then there exist unique real-valued functions a1, . . . , an on U such that
, then there exist unique real-valued functions a1, . . . , an on U such that
![]()
for each ![]() .
.
Thus we may regard a differential form as simply an “expression of the form” (13) , remembering that, for each ![]() , this expression denotes the linear function whose value at
, this expression denotes the linear function whose value at ![]() is
is
![]()
The differential form ω is said to be continuous (or differentiable, or ![]() ) provided that its coefficient functions a1, . . . , an are continuous (or differentiable, or
) provided that its coefficient functions a1, . . . , an are continuous (or differentiable, or ![]() ).
).
Now let ω be a continuous differential form on ![]() , and γ : [a, b] → U a
, and γ : [a, b] → U a ![]() path. We define the integral of ω over the path γ by
path. We define the integral of ω over the path γ by
![]()
In other words, if ω = a1 dx1 + · · · + an dxn, then
![]()
Note the agreement between this and formula (11) ; a line integral is simply the integral of the differential form appearing as its “integrand.”
Example 3 Let ω be the differential form defined on ![]() 2 minus the origin by
2 minus the origin by
![]()
If γ1 : [0, 1] → ![]() 2 − {0} is defined by γ1(t) = (cos πt, sin πt), then the image of γ1 is the upper half of the unit circle, and
2 − {0} is defined by γ1(t) = (cos πt, sin πt), then the image of γ1 is the upper half of the unit circle, and
![]()
If γ2 : [0, 1] → ![]() 2 − {0} is defined by γ2(t) = (cos πt, − sin πt), then the image of γ2 is the lower half of the unit circle (Fig. 5.6) , and
2 − {0} is defined by γ2(t) = (cos πt, − sin πt), then the image of γ2 is the lower half of the unit circle (Fig. 5.6) , and
![]()
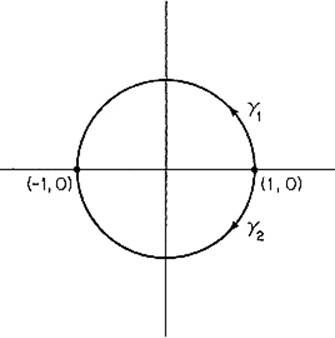
Figure 5.6
In a moment we will see the significance of the fact that ![]() .
.
Recall that, if f is a differentiable real-valued function on the open set ![]() , then its differential dfx at
, then its differential dfx at ![]() is the linear function on
is the linear function on ![]() n defined by
n defined by
![]()
Consequently we see that the differential of a differentiable function is a differential form
![]()
or
![]()
Example 4 Let U denote ![]() 2 minus the nonnegative x-axis; that is,
2 minus the nonnegative x-axis; that is, ![]() unless
unless ![]() and y = 0. Let θ : U →
and y = 0. Let θ : U → ![]() be the polar angle function defined in the obvious way (Fig. 5.7) . In particular,
be the polar angle function defined in the obvious way (Fig. 5.7) . In particular,
![]()
if x ≠ 0, so
![]()
Therefore
![]()
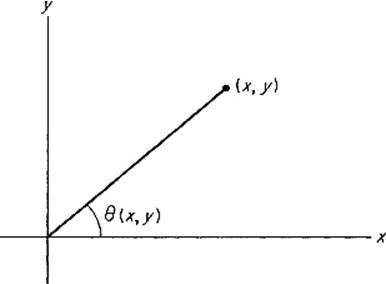
Figure 5.7
on U; the differential of θ agrees on its domain of definition U with the differential form ω of Example 3. Although
![]()
is defined on ![]() 2 − {0}, it is clear that the angle function cannot be extended continuously to
2 − {0}, it is clear that the angle function cannot be extended continuously to ![]() 2 − {0}. As a consequence of the next theorem, we will see that ω is not the differential of any differentiable function that is defined on all of
2 − {0}. As a consequence of the next theorem, we will see that ω is not the differential of any differentiable function that is defined on all of ![]() 2 − {0}.
2 − {0}.
Recall the fundamental theorem of calculus in the form
![]()
Now f′(t) dt is simply the differential at t of f : ![]() →
→ ![]() ; dt :
; dt : ![]() →
→ ![]() is the identity mapping. If γ : [a, b] → [a, b] is also the identity, then
is the identity mapping. If γ : [a, b] → [a, b] is also the identity, then
![]()
and f(b) − f(a) = f(γ(b)) − f(γ(a)), so the fundamental theorem of calculus takes the form
![]()
The following theorem generalizes this formula; it is the “fundamental theorem of calculus for paths in ![]() n.”
n.”
Theorem 1.5 If f is a real-valued ![]() function on the open set
function on the open set ![]() , and γ : [a, b] → U is a
, and γ : [a, b] → U is a ![]() path, then
path, then
![]()
PROOF Define g : [a, b] → ![]() by g = f
by g = f ![]() γ. Then g′(t) =
γ. Then g′(t) = ![]() f(γ(t)) · γ′(t) by the chain rule, so
f(γ(t)) · γ′(t) by the chain rule, so
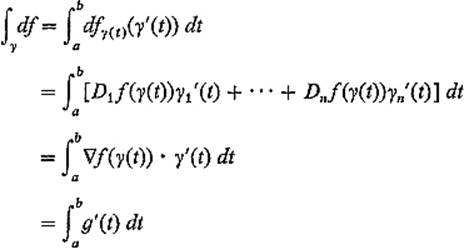
![]()
![]()
It is an immediate corollary to this theorem that, if the differential form ω on U is the differential of some ![]() function on the open set U, then the integral ∫γ ω is independent of the path γ, to the extent that it depends only on the initial and terminal points of γ.
function on the open set U, then the integral ∫γ ω is independent of the path γ, to the extent that it depends only on the initial and terminal points of γ.
Corollary 1.6 If ω = df, where f is a ![]() function on U, and α and β are two
function on U, and α and β are two ![]() paths in U with the same initial and terminal points, then
paths in U with the same initial and terminal points, then
![]()
We now see that the result ![]() of Example 3 , where γ1 and γ2 were two different paths in
of Example 3 , where γ1 and γ2 were two different paths in ![]() 2 − {0} from (1, 0) to (−1, 0), implies that the differential form
2 − {0} from (1, 0) to (−1, 0), implies that the differential form
![]()
is not the differential of any ![]() function on
function on ![]() 2 − {0}. Despite this fact, it is customarily denoted by dθ, because its integral over a path γ measures the polar angle between the endpoints of γ.
2 − {0}. Despite this fact, it is customarily denoted by dθ, because its integral over a path γ measures the polar angle between the endpoints of γ.
Recall that, if F : U → ![]() n is a force field on
n is a force field on ![]() and γ : [a, b] →
and γ : [a, b] → ![]() n is a
n is a ![]() path in U, then the work done by the field F in transporting a particle along the path γ is defined by
path in U, then the work done by the field F in transporting a particle along the path γ is defined by
![]()
where ω = F1 dx1 + · · · + Fn dxn. Suppose now that the force field F is conservative (see Exercise II.1.3) , that is, there exists a ![]() function g : U →
function g : U → ![]() such that F =
such that F = ![]() g. Since this means that ω = dg, Corollary 1.6 implies that Wdepends only on the initial and terminal points of γ, and in particular that
g. Since this means that ω = dg, Corollary 1.6 implies that Wdepends only on the initial and terminal points of γ, and in particular that
![]()
This is the statement that the work done by a conservative force field, in moving a particle from one point to another, is equal to the “difference in potential” of the two points.
We close this section with a discussion of the arclength form ds of an oriented curve in ![]() n. This will provide an explication of the notation of formulas (8) and (10) .
n. This will provide an explication of the notation of formulas (8) and (10) .
The set C in ![]() n is called a curve if and only if it is the image of a smooth path γ which is one-to-one. Any one-to-one smooth path which is equivalent to γ is then called a parametrization of C.
n is called a curve if and only if it is the image of a smooth path γ which is one-to-one. Any one-to-one smooth path which is equivalent to γ is then called a parametrization of C.
If ![]() , then
, then
![]()
is a unit tangent vector to C at x (Fig. 5.8) , and it is easily verified that T(x) is independent of the chosen parametrization γ of C (Exercise 1.3) . Such a continuous mapping T : C → ![]() n, such that T(x) is a unit tangent vector to C at x, is called an orientation for C. An oriented curve is then a pair (C, T), where T is an orientation for C. However we will ordinarily abbreviate (C, −T) to C, and write − C for (C, −T), the same geometric curve with the opposite orientation.
n, such that T(x) is a unit tangent vector to C at x, is called an orientation for C. An oriented curve is then a pair (C, T), where T is an orientation for C. However we will ordinarily abbreviate (C, −T) to C, and write − C for (C, −T), the same geometric curve with the opposite orientation.
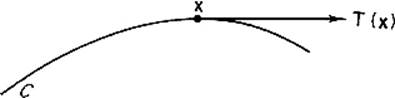
Figure 5.8
Given an oriented curve C in ![]() n, its arclength form ds is defined for
n, its arclength form ds is defined for ![]() by
by
![]()
Thus dsx(v) is simply the component of v in the direction of the unit tangent vector T(x). It is clear that dsx(v) is a linear function of ![]() , so ds is a differential form on C.
, so ds is a differential form on C.
The following theorem expresses in terms of ds the earlier integrals of this section [compare with formulas (8) and (10) ].
Theorem 1.7 Let γ be a parametrization of the oriented curve (C, T), and let ds be the arclength form of C. If f : ![]() n →
n → ![]() and F :
and F : ![]() n →
n → ![]() n are continuous mappings, then
n are continuous mappings, then
![]()
(so in particular s(γ) = ∫γ ds), and
![]()
PROOF We verify (a), and leave the proof of (b) as an exercise. By routine application of the definitions, we obtain
![]()
Finally notice that, if the differential form ω = F1 dx1 + · · · + Fn dxn is defined on the oriented smooth curve (C, T) with parametrization γ, then
by Theorem 1.7(b) . Thus every integral of a differential form, over a parametrization of an oriented smooth curve, is an “arclength integral.”
Exercises
1.1Show that the relation of equivalence of paths in ![]() n is symmetric and transitive.
n is symmetric and transitive.
1.2If α and β are equivalent paths in ![]() n, and α is smooth, show that β is also smooth.
n, and α is smooth, show that β is also smooth.
1.3Show that any two equivalent parametrizations of the smooth curve ![]() induce the same orientation of
induce the same orientation of ![]() .
.
1.4If α and β are equivalent ![]() paths in
paths in ![]() n, and ω is a continuous differential form, show that ∫α ω = ∫β ω.
n, and ω is a continuous differential form, show that ∫α ω = ∫β ω.
1.5If α : [0,1] → ![]() n is a
n is a ![]() path and ω is a continuous differential form, define β(t) = α(1 − t) for
path and ω is a continuous differential form, define β(t) = α(1 − t) for ![]() . Then show that ∫αω = − ∫βω.
. Then show that ∫αω = − ∫βω.
1.6If α : [a, b] → ![]() n and β : [c, d] →
n and β : [c, d] → ![]() n are smooth one-to-one paths with the same image, and α(a) = β(c), α(b) = β(d), show that α and β are equivalent.
n are smooth one-to-one paths with the same image, and α(a) = β(c), α(b) = β(d), show that α and β are equivalent.
1.7Show that the circumference of the ellipse x2/a2 + y2/b2 = 1 is
![]()
where ![]() denotes the standard “elliptic integral of the second kind.”
denotes the standard “elliptic integral of the second kind.”
1.8(a)Given ![]() mappings
mappings ![]() define γ = T
define γ = T ![]() c. Show that
c. Show that
![]()
and conclude that the length of γ is
![]()
where
![]()
(b)Let ![]() be the spherical coordinates mapping given by
be the spherical coordinates mapping given by
![]()
Let γ : [a, b] → ![]() 3 be a path on the unit sphere described by giving φ and θ as functions of t, that is, c(t) = (φ(t), θ(t)). Deduce from (a) that
3 be a path on the unit sphere described by giving φ and θ as functions of t, that is, c(t) = (φ(t), θ(t)). Deduce from (a) that
![]()
1.9(a)Given ![]() mappings
mappings ![]() , define γ = F
, define γ = F ![]() c. Show that
c. Show that
![]()
and conclude that the length of γ is
![]()
where gij = (∂F/∂ui) • (∂F/∂uj).
(b)Let ![]() be the cylindrical coordinates mapping given by
be the cylindrical coordinates mapping given by
![]()
Let ![]() be a path described by giving r, θ, z as functions of t, that is,
be a path described by giving r, θ, z as functions of t, that is,
![]()
Deduce from (a) that
![]()
1.10If F : ![]() n →
n → ![]() n is a
n is a ![]() force field and γ : [a, b] →
force field and γ : [a, b] → ![]() n a
n a ![]() path, use the fact that F(γ(t)) = mγ′(t) to show that the work W done by this force field in moving a particle of mass m along the path γ from γ(a) to γ(b) is
path, use the fact that F(γ(t)) = mγ′(t) to show that the work W done by this force field in moving a particle of mass m along the path γ from γ(a) to γ(b) is
![]()
where v(t) = ![]() γ′(t)
γ′(t)![]() . Thus the work done by the field equals the increase in the kinetic energy of the particle.
. Thus the work done by the field equals the increase in the kinetic energy of the particle.
1.11For each ![]() , let F(x, y) be a unit vector pointed toward the origin from (x, y). Calculate the work done by the force field F in moving a particle from (2a, 0) to (0, 0) along the top half of the circle (x − a)2 + y2 = a2.
, let F(x, y) be a unit vector pointed toward the origin from (x, y). Calculate the work done by the force field F in moving a particle from (2a, 0) to (0, 0) along the top half of the circle (x − a)2 + y2 = a2.
1.12Let dθ = (−y dx + x dy)/(x2 + y2). Thinking of polar angles, explain why it seems “obvious” that ∫γ dθ = 2π, where γ(t) = (a cos t, b sin t), ![]() . Accepting this fact, deduce from it that
. Accepting this fact, deduce from it that
![]()
1.13Let dθ = (−y dx + x dy)/(x2 + y2) on ![]() 2 − 0.
2 − 0.
(a)If γ : [0, 1] → ![]() 2 − 0 is defined by γ(t) = (cos 2kπt, sin 2kπt), where k is an integer, show that ∫γdθ = 2kπ.
2 − 0 is defined by γ(t) = (cos 2kπt, sin 2kπt), where k is an integer, show that ∫γdθ = 2kπ.
(b)If γ : [0, 1] → ![]() 2 is a closed path (that is, γ(0) = γ(1)) whose image lies in the open first quadrant, conclude from Theorem 1.5 that ∫γ dθ = 0.
2 is a closed path (that is, γ(0) = γ(1)) whose image lies in the open first quadrant, conclude from Theorem 1.5 that ∫γ dθ = 0.
1.14Let the differential form ω be defined on the open set ![]() , and suppose there exist continuous functions, f, g :
, and suppose there exist continuous functions, f, g : ![]() →
→ ![]() such that ω(x, y) = f(x) dx + g(y) dy if
such that ω(x, y) = f(x) dx + g(y) dy if ![]() . Apply Theorem 1.5 to show that ∫γ ω = 0 if γ is a closed
. Apply Theorem 1.5 to show that ∫γ ω = 0 if γ is a closed ![]() path in U.
path in U.
1.15Prove Theorem 1.7(b) . 8
1.16Let F : U → ![]() n be a continuous vector field on
n be a continuous vector field on ![]() such that
such that ![]() . If
. If ![]() is a curve in U, and γ a parametrization of
is a curve in U, and γ a parametrization of ![]() , show that
, show that
![]()
1.17If γ is a parametrization of the oriented curve ![]() with arclength form ds, show that dsγ(t)(γ′(t)) =
with arclength form ds, show that dsγ(t)(γ′(t)) = ![]() γ′(t)
γ′(t)![]() , so
, so
![]()
1.18Let γ(t) = (cos t, sin t) for ![]() be the standard parametrization of the unit circle in
be the standard parametrization of the unit circle in ![]() 2. If
2. If
![]()
on ![]() 2 − 0, calculate ∫γ ω. Then explain carefully why your answer implies that there is no function f :
2 − 0, calculate ∫γ ω. Then explain carefully why your answer implies that there is no function f : ![]() 2 − 0 →
2 − 0 → ![]() with df = ω.
with df = ω.
1.19Let ω = y dx + x dy + 2z dz on ![]() 3. Write down by inspection a differentiable function f :
3. Write down by inspection a differentiable function f : ![]() 3 →
3 → ![]() such that df = ω. If γ: [a, b] →
such that df = ω. If γ: [a, b] → ![]() 3 is a
3 is a ![]() path from (1, 0, 1) to (0, 1, −1), what is the value of ∫γ ω?
path from (1, 0, 1) to (0, 1, −1), what is the value of ∫γ ω?
1.20Let γ be a smooth parametrization of the curve ![]() in
in ![]() 2, with unit tangent T and unit normal N defined by
2, with unit tangent T and unit normal N defined by
![]()
and
![]()
Given a vector field F = (F1, F2) on ![]() 2, let ω = −F2 dx + F1 dy, and then show that
2, let ω = −F2 dx + F1 dy, and then show that
![]()
1.21Let ![]() be an oriented curve in
be an oriented curve in ![]() n, with unit tangent vector T = (t1, . . . , tn).
n, with unit tangent vector T = (t1, . . . , tn).
(a)Show that the definition [Eq. (16)] of the arclength form ds of C is equivalent to
![]()
(b)If the vector v is tangent to C, show that
![]()
(c)If F = (F1, . . . , Fn) is a vector field, show that the 1-forms
![]()
agree on vectors that are tangent to C.