Advanced Calculus of Several Variables (1973)
Part V. Line and Surface Integrals; Differential Forms and Stokes' Theorem
Chapter 3. MULTILINEAR FUNCTIONS AND THE AREA OF A PARALLELEPIPED
In the first two sections of the chapter we have discussed 1-forms, which are objects that can be integrated over curves (or 1-dimensional manifolds) in ![]() n. Our eventual goal in this chapter is a similar discussion of differential k-forms, which are objects that can be integrated over k-dimensional manifolds in
n. Our eventual goal in this chapter is a similar discussion of differential k-forms, which are objects that can be integrated over k-dimensional manifolds in ![]() n. The definition of 1-forms involved linear functions on
n. The definition of 1-forms involved linear functions on ![]() n; the definition of k-forms will involve multilinear functions on
n; the definition of k-forms will involve multilinear functions on ![]() n.
n.
In this section we develop the elementary theory of multilinear functions on ![]() n, and then apply it to the problem of calculating the area of a k-dimensional parallelepiped in
n, and then apply it to the problem of calculating the area of a k-dimensional parallelepiped in ![]() n. This computation will be used in our study in Section 4 of k-dimensional surface area in
n. This computation will be used in our study in Section 4 of k-dimensional surface area in ![]() n.
n.
Let (![]() n)k =
n)k = ![]() n × · · · ×
n × · · · × ![]() n (k factors), and consider a function
n (k factors), and consider a function
![]()
Then M is a function on k-tuples of vectors in ![]() if a1, . . . , ak are vectors in
if a1, . . . , ak are vectors in ![]() n. Thus we can regard M as a function of k vector variables. The function M is called k-multilinear (or just multilinear) if it is linear in each of these variables separately, that is,
n. Thus we can regard M as a function of k vector variables. The function M is called k-multilinear (or just multilinear) if it is linear in each of these variables separately, that is,
![]()
We will often call M a k-multilinear function on ![]() n, despite the fact that its domain of definition is actually (
n, despite the fact that its domain of definition is actually (![]() n)k. Note that a 1-multilinear function on
n)k. Note that a 1-multilinear function on ![]() n is just an (ordinary) linear function on
n is just an (ordinary) linear function on ![]() n.
n.
We have seen that every linear function on ![]() n is a linear combination of certain special ones, namely the projection functions dx1, . . . , dxn. Recall that, regarding
n is a linear combination of certain special ones, namely the projection functions dx1, . . . , dxn. Recall that, regarding ![]() as a column vector, dxi is the function that picks out the ith row of this vector, dxi(a) = ai.
as a column vector, dxi is the function that picks out the ith row of this vector, dxi(a) = ai.
We would like to have a similar description of multilinear functions on ![]() n. Given a k-tuple i = (i1, . . . , ik) of integers (not necessarily distinct) between 1 and
n. Given a k-tuple i = (i1, . . . , ik) of integers (not necessarily distinct) between 1 and ![]() we define the function
we define the function
![]()
by
That is, if A is the n × k matrix whose column vectors are a1, . . . , ak,
![]()
and Ai denotes the k × k matrix whose rth row is the irth row of A, then
![]()
Note that Ai is a k × k submatrix of A if i is an increasing k-tuple, that is, if ![]() .
.
It follows immediately from the properties of determinants that dxi is a k-multilinear function on ![]() n and, moreover, is alternating. The k-multilinear function M on
n and, moreover, is alternating. The k-multilinear function M on ![]() n is called alternating if
n is called alternating if
![]()
whenever some pair of the vectors a1, . . . , ak are equal, say ar = as (r ≠ s). The fact that dxi is alternating then follows from the fact that a determinant vanishes if some pair of its columns are equal.
It is easily proved (Exercise 3.1) that the k-multilinear function M on ![]() n is alternating if and only if it changes signs upon the interchange of two of the vectors a1, . . . , ak, that is,
n is alternating if and only if it changes signs upon the interchange of two of the vectors a1, . . . , ak, that is,
![]()
The notation dxi generalizes the notation dxi for the ith projection function on ![]() n, and we will prove (Theorem 3.4) that every alternating k-multilinear function M on
n, and we will prove (Theorem 3.4) that every alternating k-multilinear function M on ![]() n is a linear combination of the dxi. That is, there exist real numbers ai such that
n is a linear combination of the dxi. That is, there exist real numbers ai such that
![]()
the summation being over all k-tuples i of integers from 1 to n. This generalizes the fact that every linear function on ![]() n is of the form
n is of the form ![]() Notice that every linear function on
Notice that every linear function on ![]() n is automatically alternating.
n is automatically alternating.
Proposition 3.1 If M is an alternating k-multilinear function on ![]() n, then
n, then
![]()
if the vectors a1, . . . , ak are linearly dependent.
This follows immediately from the definitions and the fact that some one of the vectors a1, . . . , ak must be a linear combination of the others (Exercise 3.2) .
Corollary 3.2 If k > n, then the only alternating k-multilinear function on ![]() n is the trivial one whose only value is zero.
n is the trivial one whose only value is zero.
The following theorem describes the nature of an arbitrary k-multilinear function on ![]() n (not necessarily alternating).
n (not necessarily alternating).
Theorem 3.3 Let M be a k-multilinear function on ![]() n. If a1, . . . , ak are vectors in
n. If a1, . . . , ak are vectors in ![]() n, aj = (a1j, . . . , anj), then
n, aj = (a1j, . . . , anj), then
![]()
where
![]()
Here ei denotes the ith standard unit basis vector in ![]() n.
n.
PROOF The proof is by induction on k, the case k = 1 being clear by linearity.
For each r = 1, . . . , n, let Nr denote the (k − 1)-multilinear function on ![]() n defined by
n defined by
![]()
Then
as desired.
![]()
We can now describe the structure of M in terms of the dxi, under the additional hypothesis that M is alternating.
Theorem 3.4 If M is an alternating k-multilinear function on ![]() n, then
n, then
![]()
where ![]() . Here the notation [i] signifies summation over all increasing k-tuples i = (i1, . . . , ik).
. Here the notation [i] signifies summation over all increasing k-tuples i = (i1, . . . , ik).
For the proof we will need the following.
Lemma 3.5 Let i = (i1, . . . , ik) and j = (j1, . . . , ik) be increasing k-tuples of integers from 1 to n. Then
![]()
This lemma follows from the fact that ![]() is the determinant of the matrix (δij), where
is the determinant of the matrix (δij), where
![]()
If i = j, then (δij) is the k × k identity matrix; otherwise some row of (δij) is zero, so its determinant vanishes.
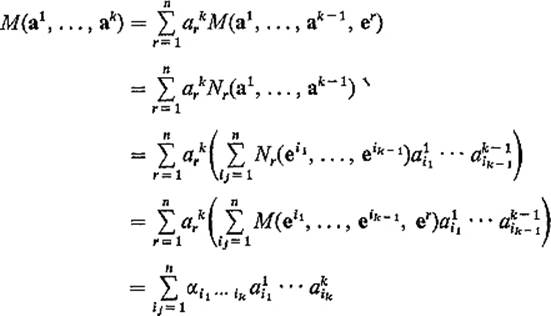
PROOF OF THEOREM 3.4 Define the alternating k-multilinear function ![]() on
on ![]() n by
n by
![]()
where ![]() . We want to prove that M =
. We want to prove that M = ![]() .
.
By Theorem 3.3 it suffices (because M and ![]() are both alternating) to show that
are both alternating) to show that
![]()
for every increasing k-tuple j = (j1, . . . , jk). But
immediately by Lemma 3.5 .
![]()
The determinant function, considered as a function of the column vectors of an n × n matrix, is an alternating n-multilinear function on ![]() n. This, together with the fact that the determinant of the identity matrix is 1, uniquely characterizes the determinant.
n. This, together with the fact that the determinant of the identity matrix is 1, uniquely characterizes the determinant.
Corollary 3.6 D = det is the only alternating n-multilinear function on ![]() n such that
n such that
![]()
PROOF Exercise 3.3.
![]()
As an application of Theorem 3.4 , we will next prove the Binet–Cauchy product formula, a generalization of the fact that the determinant of the product of two n × n matrices is equal to the product of their determinants. Recall that, if A is an n × k matrix, and i = (i1, . . . , ik), then Ai denotes that k × k matrix whose rth row is the irth row of A.
Theorem 3.7 Let A be an k × n matrix and B an n × k matrix, where ![]() . Then
. Then
![]()
Here At denotes the transpose of A and, as in Theorem 3.4 , [i] signifies summation over increasing k-tuples.
Note that the case k = n, when A and B are both n × n matrices, is
![]()
PROOF Let a1, . . . , ak be the row vectors of A, and b1, . . . , bk the column vectors of B. Since
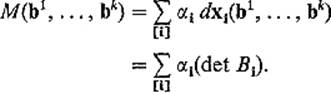
we see that, by holding fixed the matrix A, we obtain an alternating k-multilinear function M of the vectors b1, . . . , bk,
![]()
Consequently by Theorem 3.4 there exist numbers αi (depending upon the matrix A) such that
![]()
Then
But
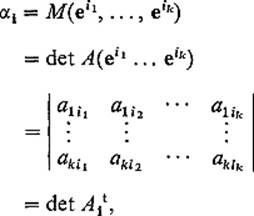
so
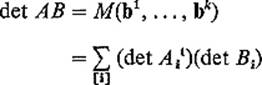
as desired.
![]()
Taking A = Bt, we obtain
Corollary 3.8 If A is an n × k matrix, ![]() , then
, then
![]()
Our reason for interest in the Binet–Cauchy product formula stems from its application to the problem of computing the area of an k-dimensional parallelepiped in ![]() n. Let a1, . . . , ak be k vectors in
n. Let a1, . . . , ak be k vectors in ![]() n. By the k-dimensional parallelepiped P which they span is meant the set
n. By the k-dimensional parallelepiped P which they span is meant the set
![]()
This is the natural generalization of a parallelogram spanned by two vectors in the plane. If k = n, then P is the image of the unit cube In, under the linear mapping ![]() :
: ![]() n →
n → ![]() n such that L(ei) = ai, i = 1, . . . , n. In this case the volume of P is given by the following theorem.
n such that L(ei) = ai, i = 1, . . . , n. In this case the volume of P is given by the following theorem.
Theorem 3.9 Let P be the parallelepiped in ![]() n that is spanned by the vectors a1, . . . , an. Then its volume is
n that is spanned by the vectors a1, . . . , an. Then its volume is
![]()
where A is the n × n matrix whose column vectors are a1, . . . , an.
PROOF If the linear mapping L : ![]() n →
n → ![]() is defined by
is defined by
![]()
then L(ei) = ai, i = 1, . . . , n. Hence P = L(In). Therefore, by Theorem IV.5.1 ,
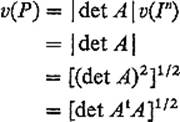
since
![]()
Now let X be a subset of a k-dimensional subspace V of ![]() n (k < n). A choice of an orthonormal basis v1, . . . , vk for V (which exists by Theorem I.3.3) determines a 1-1 linear mapping φ : V →
n (k < n). A choice of an orthonormal basis v1, . . . , vk for V (which exists by Theorem I.3.3) determines a 1-1 linear mapping φ : V → ![]() k, defined by φ(vi) = ei. We want to define the k-dimensional area a(X) by
k, defined by φ(vi) = ei. We want to define the k-dimensional area a(X) by
![]()
However we must show that a(X) is independent of the choice of basis for V. If w1, . . . , wk is a second orthonormal basis for V, determining the one-to-one linear mapping ![]() : V →
: V → ![]() k by
k by ![]() (wi) = ei, then it is easily verified that
(wi) = ei, then it is easily verified that
![]()
is an orthogonal mapping (Exercise I.6.10) . It therefore preserves volumes, by Corollary IV.5.2. Since ![]()
![]() φ−1(φ(X)) =
φ−1(φ(X)) = ![]() (X), we conclude that v(φ(X)) = v(
(X), we conclude that v(φ(X)) = v(![]() (X)), so a(X) is well defined. The following theorem shows how to compute it for a k-dimensional parallelepiped.
(X)), so a(X) is well defined. The following theorem shows how to compute it for a k-dimensional parallelepiped.
Theorem 3.10 If P is a k-dimensional parallelepiped in ![]() n (k < n) spanned by the vectors a1, . . . , ak, then
n (k < n) spanned by the vectors a1, . . . , ak, then
![]()
where A is the n × k matrix whose column vectors are a1, . . . , ak.
Thus we have the same formula when k < n as when k = n.
PROOF Let V be a k-dimensional subspace of ![]() n that contains the vectors a1, . . . , ak, and let v1, . . . , vn be an orthonormal basis for
n that contains the vectors a1, . . . , ak, and let v1, . . . , vn be an orthonormal basis for ![]() n such that v1, . . . , vk generate V. Let φ :
n such that v1, . . . , vk generate V. Let φ : ![]() n →
n → ![]() n be the orthogonal mapping defined by φ(vi) = ei, i = 1, . . . , n. If bi = φ(ai), i = 1, . . . , k, then φ(P) is the k-dimensional parallelepiped in
n be the orthogonal mapping defined by φ(vi) = ei, i = 1, . . . , n. If bi = φ(ai), i = 1, . . . , k, then φ(P) is the k-dimensional parallelepiped in ![]() k that is spanned by b1, . . . , bk. Consequently, using Theorem 3.9 and the fact that the orthogonal mapping φ preserves inner products (Exercise I.6.10) , we have
k that is spanned by b1, . . . , bk. Consequently, using Theorem 3.9 and the fact that the orthogonal mapping φ preserves inner products (Exercise I.6.10) , we have
The following formula for a(P) now follows immediately from Theorem 3.10 and Corollary 3.8 .
Theorem 3.11 If P and A are as in Theorem 3.10 , then
![]()
This result can be interpreted as a general Pythagorean theorem. To see this, let ![]() denote the k-dimensional coordinate plane in
denote the k-dimensional coordinate plane in ![]() n that is spanned by the unit basis vectors
n that is spanned by the unit basis vectors ![]() , where i = (i1, . . . , ik). If πi :
, where i = (i1, . . . , ik). If πi : ![]() n →
n → ![]() ik is the natural projection mapping, then
ik is the natural projection mapping, then
![]()
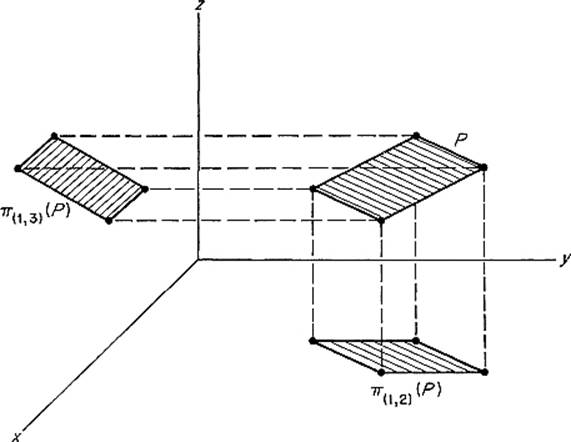
Figure 5.21
is the square of the k-dimensional area of the projection πi(P) of P into ![]() ik (see Exercise 3.4) . Thus Theorem 3.11 asserts that the area of the k-dimensional parallelepiped P is equal to the square root of the sum of the squares of the areas of all projections of P into k-dimensional coordinate planes of
ik (see Exercise 3.4) . Thus Theorem 3.11 asserts that the area of the k-dimensional parallelepiped P is equal to the square root of the sum of the squares of the areas of all projections of P into k-dimensional coordinate planes of ![]() n (see Fig. 5.21 for the case k = 2, n = 3). For k = 1, this is just the statement that the length of a vector is equal to the square root of the sum of the squares of its components.
n (see Fig. 5.21 for the case k = 2, n = 3). For k = 1, this is just the statement that the length of a vector is equal to the square root of the sum of the squares of its components.
Exercises
3.1Prove that the k-multilinear function M on ![]() n is alternating if and only if the value M(a1, . . . , ak) changes sign when ar and as are interchanged. Hint: Consider M(a1, . . . , ar + as, . . . , ar + as, . . . , ak).
n is alternating if and only if the value M(a1, . . . , ak) changes sign when ar and as are interchanged. Hint: Consider M(a1, . . . , ar + as, . . . , ar + as, . . . , ak).
3.2Prove Proposition 3.1 .
3.3Prove Corollary 3.6 .
3.4Verify the assertion in the last paragraph of this section, that det Ait Ai is the square of the k-dimensional area of the projection πi(P), of the parallelepiped spanned by the column vectors of the n × k matrix A, into ![]() ik.
ik.
3.5Let P be the 2-dimensional parallelogram in ![]() 3 spanned by the vectors a and b. Deduce from Theorem 3.11 the fact that its area is a(P) =
3 spanned by the vectors a and b. Deduce from Theorem 3.11 the fact that its area is a(P) = ![]() a × b
a × b![]() .
.
3.6Let P be the 3-dimensional parallelepiped in ![]() 3 that is spanned by the vectors a, b, c. Deduce from Theorem 3.9 that its volume is v(P) =
3 that is spanned by the vectors a, b, c. Deduce from Theorem 3.9 that its volume is v(P) = ![]() a · b × c
a · b × c![]() .
.