Advanced Calculus of Several Variables (1973)
Part VI. The Calculus of Variations
The calculus of variations deals with a certain class of maximum–minimum problems, which have in common the fact that each of them is associated with a particular sort of integral expression. The simplest example of such a problem is the following. Let f: ![]() 3 →
3 → ![]() be a given
be a given ![]() function, and denote by
function, and denote by ![]() the set of all real-valued
the set of all real-valued ![]() functions defined on the interval [a, b]. Given
functions defined on the interval [a, b]. Given ![]() , define
, define ![]() by
by
![]()
Then F is a real-valued function on ![]() . The problem is then to find that element
. The problem is then to find that element ![]() , if any, at which the function
, if any, at which the function ![]() attains its maximum (or minimum) value, subject to the condition that φ has given preassigned values φ(a) = α and φ(b) = β at the endpoints of [a, b].
attains its maximum (or minimum) value, subject to the condition that φ has given preassigned values φ(a) = α and φ(b) = β at the endpoints of [a, b].
For example, if we want to find the ![]() function φ : [a, b] →
function φ : [a, b] → ![]() whose graph x = φ(t) (in the tx-plane, Fig. 6.1) joins the points (a, α) and (b, β) and has minimal length, then we want to minimize the function
whose graph x = φ(t) (in the tx-plane, Fig. 6.1) joins the points (a, α) and (b, β) and has minimal length, then we want to minimize the function ![]() defined by
defined by
![]()
Here the function f : ![]() 3 →
3 → ![]() is defined by
is defined by ![]() .
.
Note that in the above problem the “unknown” is a function ![]() , rather than a point in
, rather than a point in ![]() n (as in the maximum–minimum problems which we considered in Chapter II). The “function space”
n (as in the maximum–minimum problems which we considered in Chapter II). The “function space” ![]() , is, like
, is, like ![]() n, a vector space, albeit an infinite-dimensional one. The purpose of this chapter is to appropriately generalize the finite-dimensional methods of Chapter II so as to treat some of the standard problems of the calculus of variations.
n, a vector space, albeit an infinite-dimensional one. The purpose of this chapter is to appropriately generalize the finite-dimensional methods of Chapter II so as to treat some of the standard problems of the calculus of variations.
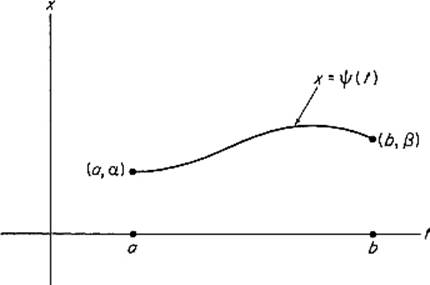
Figure 6.1
In Section 3 we will show that, if ![]() maximizes (or minimizes) the function
maximizes (or minimizes) the function ![]() defined by (*), subject to the conditions φ(a) = α and φ(b) = β, then φ satisfies the Euler–Lagrange equation
defined by (*), subject to the conditions φ(a) = α and φ(b) = β, then φ satisfies the Euler–Lagrange equation
![]()
The proof of this will involve a generalized version of the familiar technique of “setting the derivative equal to zero, and then solving for the unknown.”
In Section 4 we discuss the so-called “isoperimetric problem,” in which it is desired to maximize or minimize the function
![]()
subject to the conditions ψ(a) = α, ψ(b) = β and the “constraint”
![]()
Here f and g are given ![]() functions on
functions on ![]() 3. We will see that, if
3. We will see that, if ![]() is a solution for this problem, then there exists a number
is a solution for this problem, then there exists a number ![]() such that φ satisfies the Euler–Lagrange equation
such that φ satisfies the Euler–Lagrange equation
![]()
for the function h : ![]() 3 →
3 → ![]() defined by
defined by
![]()
This assertion is reminiscent of the constrained maximum–minimum problems of Section II.5, and its proof will involve a generalization of the Lagrange multiplier method that was employed there.
As preparation for these general maximum–minimum methods, we need to develop the rudiments of “calculus in normed vector spaces.” This will be done in Sections 1 and 2.
Chapter 1. NORMED VECTOR SPACES AND UNIFORM CONVERGENCE
The introductory remarks above indicate that certain typical calculus of variations problems lead to a consideration of “function spaces” such as the vector space ![]() of all continuously differentiable functions defined on the interval [a, b]. It will be important for our purpose to define a norm on the vector space
of all continuously differentiable functions defined on the interval [a, b]. It will be important for our purpose to define a norm on the vector space ![]() , thereby making it into a normed vector space. As we will see in Section 2, this will make it possible to study real-valued functions on
, thereby making it into a normed vector space. As we will see in Section 2, this will make it possible to study real-valued functions on ![]() by the methods of differential calculus.
by the methods of differential calculus.
Recall (from Section I.3) that a norm on the vector space V is a real-valued function x → ![]() x
x ![]() on V satisfying the following conditions:
on V satisfying the following conditions:
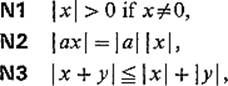
for all ![]() and
and ![]() . The norm
. The norm ![]() x
x![]() of the vector
of the vector ![]() may be thought of as its length or “size.” Also, given
may be thought of as its length or “size.” Also, given ![]() , the norm
, the norm ![]() x − y
x − y![]() of x − y may be thought of as the “distance” from x to y.
of x − y may be thought of as the “distance” from x to y.
Example 1 We have seen in Section I.3 that each of the following definitions gives a norm on ![]() n:
n:

where ![]() . It was (and is) immediate that
. It was (and is) immediate that ![]()
![]() 0 and
0 and ![]()
![]() 1 are norms on
1 are norms on ![]() n, while the verification that
n, while the verification that ![]()
![]() 2 satisfies the triangle inequality (Condition N3) required the Cauchy–Schwarz inequality (Theorem I.3.1).
2 satisfies the triangle inequality (Condition N3) required the Cauchy–Schwarz inequality (Theorem I.3.1).
Any two norms on ![]() n are equivalent in the following sense. The two norms
n are equivalent in the following sense. The two norms ![]()
![]() 1 and
1 and ![]()
![]() 2 on the vector space V are said to be equivalent if there exist positive numbers a and b such that
2 on the vector space V are said to be equivalent if there exist positive numbers a and b such that
![]()
for all ![]() . We leave it as an easy exercise for the reader to check that this relation between norms on V is an equivalence relation (in particular, if the norms
. We leave it as an easy exercise for the reader to check that this relation between norms on V is an equivalence relation (in particular, if the norms ![]()
![]() 1 and
1 and ![]()
![]() 2 on V are equivalent, and also
2 on V are equivalent, and also ![]()
![]() 2 and
2 and ![]()
![]() 3 are equivalent, then it follows that
3 are equivalent, then it follows that ![]()
![]() 1 and
1 and ![]()
![]() 3 are equivalent norms on V).
3 are equivalent norms on V).
We will not include here the full proof that any two norms on ![]() n are equivalent. However let us show that any continuous norm
n are equivalent. However let us show that any continuous norm ![]()
![]() on
on ![]() n (that is,
n (that is, ![]() x
x![]() is a continuous function of x) is equivalent to the Euclidean norm
is a continuous function of x) is equivalent to the Euclidean norm ![]()
![]() 2. Since
2. Since ![]()
![]() is continuous on the unit sphere
is continuous on the unit sphere
![]()
there exist positive numbers m and M such that
![]()
for all ![]() . Given
. Given ![]() , choose a > 0 such that x = ay with
, choose a > 0 such that x = ay with ![]() . Then the above inequality gives
. Then the above inequality gives
![]()
so
![]()
as desired. In particular, the sup norm and the 1-norm of Example 1 are both equivalent to the Euclidean norm, since both are obviously continuous. For the proof that every norm on ![]() n is continuous, see Exercise 1.7.
n is continuous, see Exercise 1.7.
Equivalent norms on the vector space V give rise to equivalent notions of sequential convergence in V. The sequence ![]() of points of V is said to converge to
of points of V is said to converge to ![]() with respect to the norm
with respect to the norm ![]()
![]() if and only if
if and only if
![]()
Lemma 1.1 Let ![]()
![]() 1 and
1 and ![]()
![]() 2 be equivalent norms on the vector space V. Then the sequence
2 be equivalent norms on the vector space V. Then the sequence ![]() converges to
converges to ![]() with respect to the norm
with respect to the norm ![]()
![]() 1 if and only if it converges to x with respect to the norm
1 if and only if it converges to x with respect to the norm ![]()
![]() 2.
2.
This follows almost immediately from the definitions; the easy proof is left to the reader.
Example 2 Let V be the vector space of all continuous real-valued functions on the closed interval [a, b], with the vector space operations defined by
![]()
where ![]() and
and ![]() . We can define various norms on V, analogous to the norms on
. We can define various norms on V, analogous to the norms on ![]() n in Example 1, by
n in Example 1, by
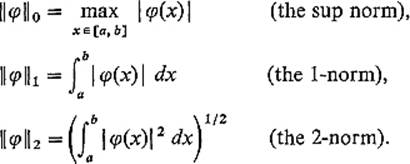
Again it is an elementary matter to show that ![]()
![]() 0 and
0 and ![]()
![]() 1 are indeed norms on V, while the verification that
1 are indeed norms on V, while the verification that ![]()
![]() 2 satisfies the triangle inequality requires the Cauchy–Schwarz inequality (see the remarks following the proof of Theorem 3.1 in Chapter I). We will denote by
2 satisfies the triangle inequality requires the Cauchy–Schwarz inequality (see the remarks following the proof of Theorem 3.1 in Chapter I). We will denote by ![]() the normed vector space V with the sup norm
the normed vector space V with the sup norm ![]()
![]() 0.
0.
No two of the three norms in Example 2 are equivalent. For example, to show that ![]()
![]() 0 and
0 and ![]()
![]() 1 are not equivalent, consider the sequence
1 are not equivalent, consider the sequence ![]() of elements of V defined by
of elements of V defined by
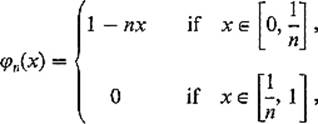
and let φ0(x) = 0 for ![]() (here the closed interval [a, b] is the unit interval [0, 1]). Then it is clear that
(here the closed interval [a, b] is the unit interval [0, 1]). Then it is clear that ![]() converges to φ0 with respect to the 1-norm
converges to φ0 with respect to the 1-norm ![]()
![]() 1 because
1 because
![]()
However ![]() does not converge to φ0 with respect to the sup norm
does not converge to φ0 with respect to the sup norm ![]()
![]() 0 because
0 because
![]()
for all n. It therefore follows from Lemma 1.1 that the norms ![]()
![]() 0 and
0 and ![]()
![]() 1 are not equivalent.
1 are not equivalent.
Next we want to prove that ![]() , the vector space of Example 2 with the sup norm, is complete. The normed vector space V is called complete if every Cauchy sequence of elements of V converges to some element of V. Just as in
, the vector space of Example 2 with the sup norm, is complete. The normed vector space V is called complete if every Cauchy sequence of elements of V converges to some element of V. Just as in ![]() n, the sequence
n, the sequence ![]() is called a Cauchy sequence if, given
is called a Cauchy sequence if, given ![]() > 0, there exists a positive integer N such that
> 0, there exists a positive integer N such that
![]()
These definitions are closely related to the following properties of sequences of functions. Let ![]() be a sequence of real-valued functions, each defined on the set S. Then
be a sequence of real-valued functions, each defined on the set S. Then ![]() is called a uniformly Cauchy sequence (of functions on S) if, given
is called a uniformly Cauchy sequence (of functions on S) if, given ![]() > 0, there exists N such that
> 0, there exists N such that
![]()
for every ![]() . We say that
. We say that ![]() converges uniformly to the function f: S →
converges uniformly to the function f: S → ![]() if, given
if, given ![]() > 0, there exists N such that
> 0, there exists N such that
![]()
for every ![]() .
.
Example 3 Consider the sequence ![]() , where fn : [0, 1] →
, where fn : [0, 1] → ![]() is the function whose graph is shown in Fig. 6.2. Then limn→∞ fn(x) = 0 for every
is the function whose graph is shown in Fig. 6.2. Then limn→∞ fn(x) = 0 for every ![]() . However the sequence
. However the sequence ![]() does not converge uniformly to its pointwise limit f(x) ≡ 0, because
does not converge uniformly to its pointwise limit f(x) ≡ 0, because ![]() fn
fn![]() = 1 for every n (sup norm).
= 1 for every n (sup norm).
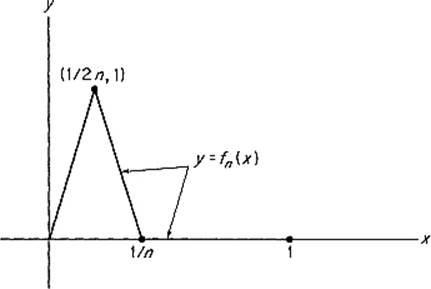
Figure 6.2
Example 4 Let fn(x) = xn on [0, 1]. Then
![]()
so the pointwise limit function is not continuous. It follows from Theorem 1.2 below that the sequence {fn} does not converge uniformly to f.
Comparing the above definitions, note that a Cauchy sequence in ![]() is simply a uniformly Cauchy sequence of continuous functions on [a, b], and that the sequence
is simply a uniformly Cauchy sequence of continuous functions on [a, b], and that the sequence ![]() converges with respect to the sup norm to
converges with respect to the sup norm to ![]() if and only if it converges uniformly to φ. Therefore, in order to prove that
if and only if it converges uniformly to φ. Therefore, in order to prove that ![]() is complete, we need to show that every uniformly Cauchy sequence of continuous functions on [a, b] converges uniformly to some continuous function on [a, b]. The first step is the proof that, if a sequence of continuous functions converges uniformly, then the limit function is continuous.
is complete, we need to show that every uniformly Cauchy sequence of continuous functions on [a, b] converges uniformly to some continuous function on [a, b]. The first step is the proof that, if a sequence of continuous functions converges uniformly, then the limit function is continuous.
Theorem 1.2 Let S be a subset of ![]() k. Let
k. Let ![]() be a sequence of continuous real-valued functions on S. If
be a sequence of continuous real-valued functions on S. If ![]() converges uniformly to the function f: S →
converges uniformly to the function f: S → ![]() , then f is continuous.
, then f is continuous.
PROOF Given ![]() > 0, first choose N sufficiently large that
> 0, first choose N sufficiently large that ![]() fN(x) − f(x)
fN(x) − f(x)![]() <
< ![]() /3 for all
/3 for all ![]() (by the uniform convergence). Then, given
(by the uniform convergence). Then, given ![]() , choose δ > 0 such that
, choose δ > 0 such that
![]()
(by the continuity of fN at x0). If ![]() and
and ![]() x − x0
x − x0![]() < δ, then it follows that
< δ, then it follows that

so f is continuous at x0.
![]()
Corollary 1.3 ![]() is complete.
is complete.
PROOF Let ![]() be a Cauchy sequence of elements of
be a Cauchy sequence of elements of ![]() , that is, a uniformly Cauchy sequence of continuous real-valued functions on [a, b]. Given
, that is, a uniformly Cauchy sequence of continuous real-valued functions on [a, b]. Given ![]() > 0, choose N such that
> 0, choose N such that
![]()
Then, in particular, ![]() φm(x) − φn(x)
φm(x) − φn(x)![]() <
< ![]() /2 for each
/2 for each ![]() . Therefore
. Therefore ![]() is a Cauchy sequence of real numbers, and hence converges to some real number φ(x). It remains to show that the sequence of functions {φn} converges uniformly to φ; if so, Theorem 1.2 will then imply that
is a Cauchy sequence of real numbers, and hence converges to some real number φ(x). It remains to show that the sequence of functions {φn} converges uniformly to φ; if so, Theorem 1.2 will then imply that ![]() .
.
We assert that ![]() (same N as above, n fixed) implies that
(same N as above, n fixed) implies that
![]()
To see this, choose ![]() sufficiently large (depending upon x) that
sufficiently large (depending upon x) that ![]() φ(x) − φm(x)
φ(x) − φm(x)![]() <
< ![]() /2. Then it follows that
/2. Then it follows that
Since ![]() was arbitrary, it follows that
was arbitrary, it follows that ![]() φn − φ
φn − φ![]() <
< ![]() as desired.
as desired.
![]()
Example 5 Let ![]() denote the vector space of all continuously differentiable real-valued functions on [a, b], with the vector space operations of
denote the vector space of all continuously differentiable real-valued functions on [a, b], with the vector space operations of ![]() , but with the “
, but with the “![]() -norm” defined by
-norm” defined by
![]()
for ![]() . We leave it as an exercise for the reader to verify that this does define a norm on
. We leave it as an exercise for the reader to verify that this does define a norm on ![]() .
.
In Section 4 we will need to know that the normed vector space ![]() is complete. In order to prove this, we need a result on the termwise-differentiation of a sequence of continuously differentiable functions on [a, b]. Suppose that the sequence
is complete. In order to prove this, we need a result on the termwise-differentiation of a sequence of continuously differentiable functions on [a, b]. Suppose that the sequence ![]() converges (pointwise) to f, and that the sequence of derivatives
converges (pointwise) to f, and that the sequence of derivatives ![]() converges to g. We would like to know whether f′ = g. Note that this is the question as to whether
converges to g. We would like to know whether f′ = g. Note that this is the question as to whether
![]()
an “interchange of limits” problem of the sort considered at the end of Section IV.3. The following theorem asserts that this interchange of limits is valid, provided that the convergence of the sequence of derivatives is uniform.
Theorem 1.4 Let ![]() be a sequence of continuously differentiable real-valued functions on [a, b], converging (pointwise) to f. Suppose that the
be a sequence of continuously differentiable real-valued functions on [a, b], converging (pointwise) to f. Suppose that the ![]() converges uniformly to a function g. Then
converges uniformly to a function g. Then ![]() converges uniformly to f, and f is differentiable, with f′ = g.
converges uniformly to f, and f is differentiable, with f′ = g.
PROOF By the fundamental theorem of calculus, we have
![]()
for each n and each ![]() . From this and Exercise IV.3.4 (on the termwise-integration of a uniformly convergent sequence of continuous functions) we obtain
. From this and Exercise IV.3.4 (on the termwise-integration of a uniformly convergent sequence of continuous functions) we obtain
Another application of the fundamental theorem yields f′ = g as desired.
To see that the convergence of ![]() to f is uniform, note that
to f is uniform, note that
The uniform convergence of the sequence ![]() therefore follows from that of the sequence
therefore follows from that of the sequence ![]() .
.
![]()
Corollary 1.5 ![]() is complete.
is complete.
PROOF Let ![]() be a Cauchy sequence of elements of
be a Cauchy sequence of elements of ![]() . Since
. Since
![]()
we see that ![]() is a uniformly Cauchy sequence of continuous functions. It follows from Corollary 1.3 that
is a uniformly Cauchy sequence of continuous functions. It follows from Corollary 1.3 that ![]() converges uniformly to a continuous function φ : [a, b] →
converges uniformly to a continuous function φ : [a, b] → ![]() . Similarly
. Similarly
![]()
so it follows, in the same way from Corollary 1.3, that ![]() converges uniformly to a continuous function ψ : [a, b] →
converges uniformly to a continuous function ψ : [a, b] → ![]() . Now Theorem 1.4 implies that φ is differentiable with φ′ = ψ, so
. Now Theorem 1.4 implies that φ is differentiable with φ′ = ψ, so ![]() . Since
. Since

the uniform convergence of the sequences ![]() and
and ![]() implies that the sequence
implies that the sequence ![]() converges to φ with respect to the
converges to φ with respect to the ![]() -norm of
-norm of ![]() . Thus every Cauchy sequence in
. Thus every Cauchy sequence in ![]() converges.
converges.
![]()
Example 6 Let ![]() denote the vector space of all
denote the vector space of all ![]() paths in
paths in ![]() n (mappings φ : [a, b] →
n (mappings φ : [a, b] → ![]() n), with the norm
n), with the norm
![]()
where ![]()
![]() 0 denotes the sup norm in
0 denotes the sup norm in ![]() n. Then it follows, from a coordinatewise application of Corollary 1.5, that the normed vector space
n. Then it follows, from a coordinatewise application of Corollary 1.5, that the normed vector space ![]() is complete.
is complete.
Exercises
1.1Verify that ![]()
![]() 0,
0, ![]()
![]() 1, and
1, and ![]()
![]() 2, as defined in Example 2, are indeed norms on the vector space of all continuous functions defined on [a, b].
2, as defined in Example 2, are indeed norms on the vector space of all continuous functions defined on [a, b].
1.2Show that the norms ![]()
![]() 1 and
1 and ![]()
![]() 2 of Example 2 are not equivalent. Hint: Truncate the function
2 of Example 2 are not equivalent. Hint: Truncate the function ![]() near 0.
near 0.
1.3Let E and F be normed vector spaces with norms ![]()
![]() E and
E and ![]()
![]() F, respectively. Then the the product set E × F is a vector space, with the vector space operations defined coordinatewise. Prove that the following are equivalent norms on E × F:
F, respectively. Then the the product set E × F is a vector space, with the vector space operations defined coordinatewise. Prove that the following are equivalent norms on E × F:
1.4If the normed vector spaces E and F are complete, prove that the normed vector space E × F, of the previous exercise, is also complete.
1.5Show that a closed subspace of a complete normed vector space is complete.
1.6Denote by ![]() n[a, b] the subspace of
n[a, b] the subspace of ![]() that consists of all polynomials of degree at most n. Show that
that consists of all polynomials of degree at most n. Show that ![]() n[a, b] is a closed subspace of
n[a, b] is a closed subspace of ![]() . Hint: Associate the polynomial
. Hint: Associate the polynomial ![]() with the point
with the point ![]() , and compare
, and compare ![]() φ
φ![]() 0 with
0 with ![]() a
a![]() .
.
1.7If ![]()
![]() is a norm on
is a norm on ![]() n, prove that the function x →
n, prove that the function x → ![]() x
x![]() is continuous on
is continuous on ![]() n. Hint: If
n. Hint: If
![]()
then
![]()
The Cauchy-Schwarz inequality then gives
![]()
where ![]() and
and ![]()
![]() is the Euclidean norm on
is the Euclidean norm on ![]() n.
n.