Advanced Calculus of Several Variables (1973)
Part I. Euclidean Space and Linear Mappings
Chapter 7. LIMITS AND CONTINUITY
We now generalize to higher dimensions the familiar single-variable definitions of limits and continuity. This is largely a matter of straightforward repetition, involving merely the use of the norm of a vector in place of the absolute value of a number.
Let D be a subset of ![]() n, and f a mapping of D into
n, and f a mapping of D into ![]() m (that is, a rule that associates with each point
m (that is, a rule that associates with each point ![]() a point
a point ![]() . We write f: D →
. We write f: D → ![]() m, and call D the domain (of definition) of f.
m, and call D the domain (of definition) of f.
In order to define limx→a f(x), the limit of f at a, it will be necessary that f be defined at points arbitrarily close to a, that is, that D contains points arbitrarily close to a. However we do not want to insist that ![]() , that is, that f be defined at a. For example, when we define the derivative f′(a) of a real-valued single-variable function as the limit of its difference quotient at a,
, that is, that f be defined at a. For example, when we define the derivative f′(a) of a real-valued single-variable function as the limit of its difference quotient at a,
![]()
this difference quotient is not defined at a.
This consideration motivates the following definition. The point a is a limit point of the set D if and only if every open ball centered at a contains points of D other than a (this is what is meant by the statement that D contains points arbitrarily close to a). By the open ball of radius r centered at a is meant the set
![]()
Note that a may, or may not, be itself a point of D. Examples: (a) A finite set of points has no limit points; (b) every point of ![]() n is a limit point of
n is a limit point of ![]() n (c) the origin 0 is a limit point of the set
n (c) the origin 0 is a limit point of the set ![]() n − 0; (d) every point of
n − 0; (d) every point of ![]() n is a limit point of the set Q of all those points of
n is a limit point of the set Q of all those points of ![]() n having rational coordinates; (e) the closed ball
n having rational coordinates; (e) the closed ball
![]()
is the set of all limit points of the open ball Br(a).
Given a mapping f: D → ![]() m, a limit point a of D, and a point
m, a limit point a of D, and a point ![]() , we say that b is the limit of f at a, written
, we say that b is the limit of f at a, written
![]()
if and only if, given ![]() > 0, there exists δ > 0 such that
> 0, there exists δ > 0 such that ![]() and 0 <
and 0 < ![]() x − a
x − a![]() < δ imply
< δ imply ![]() f(x) − b
f(x) − b![]() <
< ![]() .
.
The idea is of course that f(x) can be made arbitrarily close to b by choosing x sufficiently close to a, but not equal to a. In geometrical language (Fig. 1.6),
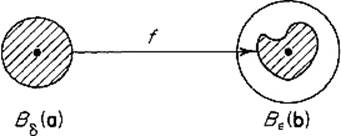
Figure 1.6
the condition of the definition is that, given any open ball B![]() (b) centered at b, there exists an open ball Bδ(a) centered at a, whose intersection with D − a is sent by f into B
(b) centered at b, there exists an open ball Bδ(a) centered at a, whose intersection with D − a is sent by f into B![]() (b).
(b).
Example 1Consider the function f: ![]() 2 →
2 → ![]() defined by
defined by
![]()
In order to prove that limx→(1,1) f(x, y) = 3, we first write

Given ![]() > 0, we want to find δ > 0 such that
> 0, we want to find δ > 0 such that ![]() (x, y) − (1, 1)
(x, y) − (1, 1)![]() = [(x − 1)2 + (y − 1)2]1/2 < δ implies that the right-hand side of (1) is <
= [(x − 1)2 + (y − 1)2]1/2 < δ implies that the right-hand side of (1) is < ![]() . Clearly we need bounds for the coefficients
. Clearly we need bounds for the coefficients ![]() x + 1
x + 1![]() and
and ![]() y
y![]() of
of ![]() x − 1
x − 1![]() in (1). So let us first agree to choose
in (1). So let us first agree to choose ![]() , so
, so

which then implies that
![]()
by (1). It is now clear that, if we take
![]()
then
![]()
as desired.
Example 2Consider the function f: ![]() 2 →
2 → ![]() defined by
defined by
To investigate lim(x,y)→0 f(x, y), let us consider the value of f(x, y) as (x, y) approaches 0 along the straight line y = αx. The lines y = ±x, along which f(x, y) = 0, are given by α = ±1. If α ≠ ±1, then
![]()
For instance,
![]()
for all x ≠ 0. Thus f(x, y) has different constant values on different straight lines through 0, so it is clear that lim(x,y)→0 f(x, y) does not exist (because, given any proposed limit b, the values ![]() and
and ![]() of f cannot both be within
of f cannot both be within ![]() of b if
of b if ![]() ).
).
Example 3Consider the function f: ![]() →
→ ![]() 2 defined by f(t) = (cos t, sin t), the familiar parametrization of the unit circle. We want to prove that
2 defined by f(t) = (cos t, sin t), the familiar parametrization of the unit circle. We want to prove that
![]()
Given ![]() > 0, we must find δ > 0 such that
> 0, we must find δ > 0 such that
![]()
In order to simplify the square root, write a = cos t − 1 and b = sin t. Then
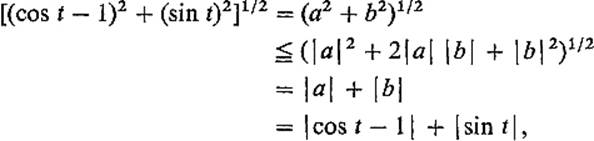
so we see that it suffices to find δ > 0 such that
![]()
But we can do this by the fact (from introductory calculus) that the functions cos t and sin t are continuous at 0 (where cos 0 = 1, sin 0 = 0).
Example 3 illustrates the fact that limits can be evaluated coordinatewise. To state this result precisely, consider f: D → ![]() m, and write
m, and write ![]() for each
for each ![]() . Then f1, . . . , fm are real-valued functions on D, called as usual the coordinate functions of f, and we write f = (f1, . . . , fm). For the function f of Example 3 we have f = (f1, f2) where f1(t) = cos t, f2(t) = sin t, and we found that
. Then f1, . . . , fm are real-valued functions on D, called as usual the coordinate functions of f, and we write f = (f1, . . . , fm). For the function f of Example 3 we have f = (f1, f2) where f1(t) = cos t, f2(t) = sin t, and we found that
![]()
Theorem 7.1Suppose f = (f1, . . . , fm): D → ![]() m, that a is a limit point of D, and
m, that a is a limit point of D, and ![]() . Then
. Then
![]()
if and only if
![]()
PROOFFirst assume (2). Then, given ![]() > 0, there exists δ > 0 such that
> 0, there exists δ > 0 such that ![]() and 0 <
and 0 < ![]() x − a
x − a![]() < δ imply that
< δ imply that ![]() f(x) − b
f(x) − b![]() <
< ![]() . But then
. But then
![]()
so (3) holds for each i = 1, . . . , m.
Conversely, assume (3). Then, given ![]() > 0, for each i = 1, . . . , m there exists a δi > 0 such that
> 0, for each i = 1, . . . , m there exists a δi > 0 such that
![]()
If we now choose δ = min(δ1, . . . , δm), then ![]() and
and
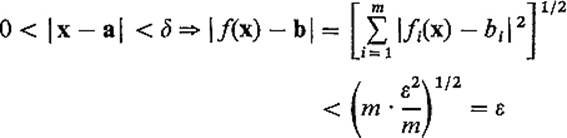
by (4), so we have shown that (3) implies (2).
![]()
The student should recall the concept of continuity introduced in single-variable calculus. Roughly speaking, a continuous function is one which has nearby values at nearby points, and thus does not change values abruptly. Precisely, the function f: D → ![]() m is said to be continuous at
m is said to be continuous at ![]() if and only if
if and only if
![]()
f is said to be continuous on D (or, simply, continuous) if it is continuous at every point of D.
Actually we cannot insist upon condition (5) if ![]() is not a limit point of D, for in this case the limit of f at a cannot be discussed. Such a point, which belongs to D but is not a limit point of D, is called an isolated point of D, and we remedy this situation by including in the definition the stipulation that f is automatically continuous at every isolated point of D.
is not a limit point of D, for in this case the limit of f at a cannot be discussed. Such a point, which belongs to D but is not a limit point of D, is called an isolated point of D, and we remedy this situation by including in the definition the stipulation that f is automatically continuous at every isolated point of D.
Example 4If D is the open ball B1(0) together with the point (2, 0), then any function f on D is continuous at (2, 0), while f is continuous at ![]() if and only if condition (5) is satisfied.
if and only if condition (5) is satisfied.
Example 5If D is the set of all those points (x, y) of ![]() 2 such that both x and y are integers, then every point of D is an isolated point, so every function on D is continuous (at every point of D).
2 such that both x and y are integers, then every point of D is an isolated point, so every function on D is continuous (at every point of D).
The following result is an immediate corollary to Theorem 7.1.
Theorem 7.2The mapping f: D → ![]() m is continuous at
m is continuous at ![]() if and only if each coordinate function of f is continuous at a.
if and only if each coordinate function of f is continuous at a.
Example 6The identity mapping π : ![]() n →
n → ![]() n, defined by π(x) = x, is obviously continuous. Its ith coordinate function, πi(x1, . . . , xn) = xi, is called the ith projection function, and is continuous by Theorem 7.2.
n, defined by π(x) = x, is obviously continuous. Its ith coordinate function, πi(x1, . . . , xn) = xi, is called the ith projection function, and is continuous by Theorem 7.2.
Example 7The real-valued functions s and p on ![]() 2, defined by s(x, y) = x + y and p(x, y) = xy, are continuous. The proofs are left as exercises.
2, defined by s(x, y) = x + y and p(x, y) = xy, are continuous. The proofs are left as exercises.
The continuity of many mappings can be established without direct recourse to the definition of continuity—instead we apply the known continuity of the elementary single-variable functions, elementary facts such as Theorem 7.2 and Examples 6 and 7, and the fact that a composition of continuous functions is continuous. Given f : D1 → ![]() m and g : D2 →
m and g : D2 → ![]() k, where
k, where ![]() and
and ![]() , the composition
, the composition
![]()
of f and g is defined as usual by g ![]() f(x) = g(f(x)) for all
f(x) = g(f(x)) for all ![]() such that
such that ![]() and
and ![]() . That is, the domain of g
. That is, the domain of g ![]() f is
f is
![]()
(This is simply the set of all x such that g(f(x)) is meaningful.)
Theorem 7.3If f is continuous at a and g is continuous at f(a), then g ![]() f is continuous at a.
f is continuous at a.
This follows immediately from the following lemma [upon setting b = f(a)].
Lemma 7.4Given f : D1 → ![]() m and g: D2 →
m and g: D2 → ![]() k where
k where ![]() and
and ![]() , suppose that
, suppose that
![]()
and that
![]()
Then
![]()
PROOFGiven ![]() > 0, we must find δ > 0 such that
> 0, we must find δ > 0 such that ![]() g(f(x)) − g(b)
g(f(x)) − g(b)![]() <
< ![]() if 0 <
if 0 < ![]() x − a
x − a![]() < δ and
< δ and ![]() , the domain of g
, the domain of g ![]() f. By (7) there exists η > 0 such that
f. By (7) there exists η > 0 such that
![]()
Then by (6) there exists δ > 0 such that
![]()
But then, upon substituting y = f(x) in (8), we obtain
![]()
as desired.
![]()
It may be instructive for the student to consider also the following geometric formulation of the proof of (Theorem 7.3 see Fig. 1.7).
Given ![]() > 0, we want δ > 0 so that
> 0, we want δ > 0 so that
![]()
Since g is continuous at f(a), there exists η > 0 such that
![]()
Then, since f is continuous at a, there exists δ > 0 such that
![]()
Then
![]()
as desired.
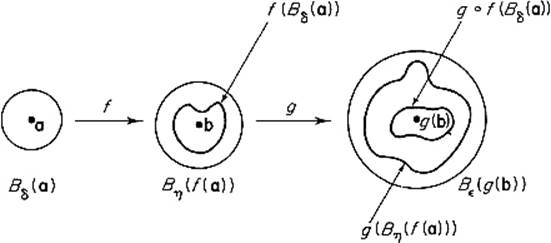
Figure 1.7
As an application of the above results, we now prove the usual theorem on limits of sums and products without mentioning ![]() and δ.
and δ.
Theorem 7.5Let f and g be real-valued functions on ![]() n. Then
n. Then
![]()
and
![]()
provided that limx → a f(x) and limx→a g(x) exist.
PROOFWe prove (9), and leave the similar proof of (10) to the exercises. Note first that
![]()
where s(x, y) = x + y is the sum function on ![]() 2 of Example 7. If
2 of Example 7. If
![]()
then limx→a (f(x), g(x)) = (b1, b2) by Theorem 7.1, so
by Lemma 7.4.
![]()
Example 8It follows by mathematical induction from Theorem 7.5 that a sum of products of continuous functions is continuous. For instance, any linear real-valued function
![]()
or polynomial in x1, . . . , xn, is continuous. It then follows from Theorem 7.1 that any linear mapping L : ![]() n →
n → ![]() m is continuous.
m is continuous.
Example 9To see that f : ![]() 3 →
3 → ![]() , defined by f(x, y, z) = sin(x + cos yz), is continuous, note that
, defined by f(x, y, z) = sin(x + cos yz), is continuous, note that
![]()
where π1, π2, π3 are the projection functions on ![]() 3, and s and p are the sum and product functions on
3, and s and p are the sum and product functions on ![]() 2.
2.
Exercises
7.1Verify that the functions s and p of Example 7 are continuous. Hint: xy − x0y0 = (xy − xy0) + (xy0 − x0y0).
7.2Give an ![]() − δ proof that the function f:
− δ proof that the function f: ![]() 3 →
3 → ![]() defined by f(x, y, z) = x2y + 2xz2 is continuous at (1, 1, 1). Hint: x2y + 2xz2 − 3 = (x2y − y) + (y − 1) + (2xz2 − 2x) + (2x − 2).
defined by f(x, y, z) = x2y + 2xz2 is continuous at (1, 1, 1). Hint: x2y + 2xz2 − 3 = (x2y − y) + (y − 1) + (2xz2 − 2x) + (2x − 2).
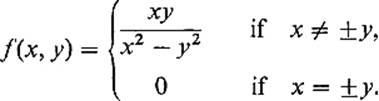
7.3If f(x, y) = (x2 − y2)/(x2 + y2) unless x = y = 0, and f(0, 0) = 0, show that f: ![]() 2 →
2 → ![]() is not continuous at (0, 0). Hint: Consider the behavior of f on straight lines through the origin.
is not continuous at (0, 0). Hint: Consider the behavior of f on straight lines through the origin.
7.4Let f(x, y) = 2x2y/(x4 + y2) unless x = y = 0, and f(0, 0) = 0. Define φ(t) = (t, at) and ψ(t) = (t, t2).
(a)Show that limt→0 f(φ(t)) = 0. Thus f is continuous on any straight line through (0, 0).
(b)Show that limt→0 f(ψ(t)) = 1. Conclude that f is not continuous at (0, 0).
7.5Prove the second part of Theorem 7.5.
7.6The point a is called a boundary point of the set ![]() if and only if every open ball centered at a contains both a point of D and a point of the complementary set
if and only if every open ball centered at a contains both a point of D and a point of the complementary set ![]() n − D.
n − D.
For example, the set of all boundary points of the open ball Br(p) is the sphere ![]() . Show that every boundary point of D is either a point of D or a limit point of D.
. Show that every boundary point of D is either a point of D or a limit point of D.
7.7Let D* denote the set of all limit points of the set D*. Then prove that the set ![]() contains all of its limit points.
contains all of its limit points.
7.8Let f: ![]() n →
n → ![]() m be continuous at the point a. If
m be continuous at the point a. If ![]() is a sequence of points of
is a sequence of points of ![]() n which converges to a, prove that the sequence
n which converges to a, prove that the sequence ![]() converges to the point f(a).
converges to the point f(a).