The Calculus Primer (2011)
Part VI. Further Applications of the Derivative
Chapter 23. RECTILINEAR AND CIRCULAR MOTION
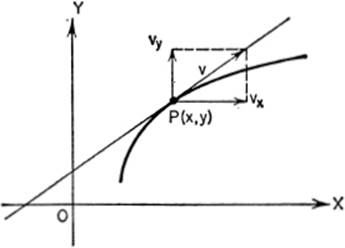
6—8.Component Velocities. Let us consider the path of a curve generated by a moving point following the law y = f(x). The coordinates of x and y of P may be regarded as functions of the time; consequently the motion of y = f(x) may also be defined by means of the parametric equations x = f(t), y = θ(t). If v represents the velocity in the direction of the tangent to the path of y = f(x) at P, then vx is the horizontal component of the velocity v, and vy is the vertical component of v.
Since ![]() by replacing shy x and y, respectively, we have:
by replacing shy x and y, respectively, we have:
![]() = the time rate of change of x,
= the time rate of change of x,
![]() = the time rate of change of y.
= the time rate of change of y.
From the figure,

6—9.Component Accelerations. In a similar manner, it is easy to find expressions for the component accelerations. Since v is, in general, a function of the time, v = F(t). If t takes on an increment Δt, then v takes on an increment Δv. Hence the average acceleration during the interval ![]() and the acceleration at any instant is the limit of
and the acceleration at any instant is the limit of ![]() hence,
hence,
![]()
By reasoning as in §6—8, the component accelerations are readily found to be
6—10.Circular Motion. Another common type of motion, in addition to rectilinear motion already briefly described, is circular motion. A body moving in a circular pathway may move at a uniform or at a non-uniform rate. If the motion is uniform, the central angle θ changes at a constant rate, known as the angular velocity of the moving point.

If, on the other hand, the motion is non-uniform, say θ = f(t), then the angular velocity will change for various positions of P; its value at any point P is given by The rate of change of the angular velocity for non-uniform circular motion is known as the angular acceleration, and is designated by α. Thus
![]()
![]()
If s (in feet, inches, etc.) represents the displacement, or distance traveled, as measured algebraically along the circular arc from P1 to P2, then
s = rθ,[3]
and the velocity (ft./sec, in./sec., etc.) along the circle is given by
![]()
it being understood throughout that θ is measured in radians.
EXAMPLE 1.A motor 4 feet in diameter is revolving uniformly at 2400 revolutions per minute. Find (a) the angular velocity; (b) the velocity of a point on the rim; (c) the distance traveled by a point on the rim in 10 seconds.
Solution.
(a)Angular velocity = ω = 2400 rev. per min.
![]()
(b)Velocity of a point on rim = rω = 2(80π) = 160π ft./sec.
(c)Distance traveled by a point on rim in 10 sec. is
(160π)(10) = 1600π ft.
EXAMPLE 2.A point moves on a circle of diameter 24 inches in such a way that its motion follows the law
θ = t3 − 4t2 + 6t.
Find (a) the angular velocity at t = 6 sec.; (b) the angular acceleration when t = 2 sec.; (c) the velocity of the point along the circle when t = 4 sec.; (d) the distance along the circle the point has moved when t = 10 sec.
Solution.
(a)![]()
when t = 6, ω = 3(6)2 − 8(6) + 6 = 66 radians per sec.
(b)![]()
when t = 2, α = 6(2) − 8 = 4 radians/sec/sec
(c)Velocity along the circle is given by![]()
when t = 4, v = 12(48 − 32 + 6) = 22 inches/sec.
(d)Distance traveled along the circle is given by
s = rθ, where θ = t3 − 4t2 + 6t;
when t = 10, θ = 1000 − 400 + 60 = 660 radians; hence s = 12(660) = 7920 inches.
6—11.Circular Motion with Constant Acceleration. If a body moving in a circular path starts from rest with an initial angular velocity of ω0, so that ω = ω0 when t = 0 and θ = 0, and if thereafter the motion is constantly accelerated by an amount α, positive or negative, it is shown in physics that throughout the motion the following relations hold:
(1)θ = ω0t + ![]() αt2;
αt2;
(2)ω = ω0 + αt;
(3)![]() (ω2 − ω02) = αθ.
(ω2 − ω02) = αθ.
The reader should compare these three equations with the analogous relations for rectilinear motion, given in Exercise 4—2, problem 6.
EXAMPLE 1.A pulley on a shaft is revolving at 120 revolutions per minute. The diameter of the pulley is 3 ft. If the pulley is brought to rest at a constant (uniform) retardation in f minute, find (a) the constant retardation, and (b) the number of revolutions made by the pulley before coming to rest.
Solution.
(a)ω0 = 120 r.p.m. = 240π radians/min.;
ω = 0, the final velocity.
ω = ω0 + αt,
0 = 240π + α(![]() ),
),
α = − 320π radians/min./min.
(b)θ = ω0t + ![]() αt2,
αt2,
![]()
90π ÷ 2π = 45 revolutions.
EXAMPLE 2.The armature of an electric motor is revolving at the rate of 1500 r.p.m. It is brought to rest at a uniform retardation of 5 radians per second. Find (a) the time required to bring it to rest; (b) how many revolutions it will make in coming to rest; and (c) how far a point on the rim will travel during this period, if the radius of the armature is 6 inches.
Solution.
(a)ω0 = 1500 r.p.m. == 25 rev./sec. = 50π radians/sec.
α = −5 radians/sec.
ω = ω0 + αt,
