What Is Mathematics? An Elementary Approach to Ideas and Methods, 2nd Edition (1996)
CHAPTER IV. PROJECTIVE GEOMETRY. AXIOMATICS. NON-EUCLIDEAN GEOMETRIES
§2. FUNDAMENTAL CONCEPTS
1. The Group of Projective Transformations
We first define the class, or “group,”† of projective transformations. Suppose we have two planes π and π′ in space, not necessarily parallel to each other. We may then perform a central projection of π onto π′ from a given center O not lying in π or π′ by defining the image of each point Pof π to be that point P′ of π′, such that P and P′ lie on the same straight line through O. We may also perform a parallel projection, where the projecting lines are all parallel. In the same way, we can define the projection of a line l in a plane π onto another line l′ in π from a point O in π or by a parallel projection. Any mapping of one figure onto another by a central or parallel projection, or by a finite succession of such projections, is called a projective transformation.† The projective geometry of the plane or of the line consists of the body of those geometrical propositions which are unaffected by arbitrary projective transformations of the figures to which they refer. In contrast, we shall call metric geometry the body of those propositions dealing with the magnitudes of figures, invariant only under the class of rigid motions.
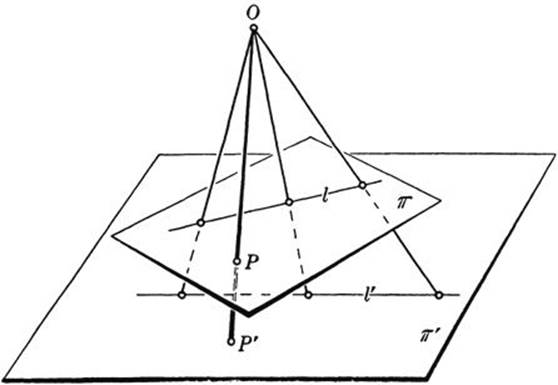
Fig. 70. Projection from a point.
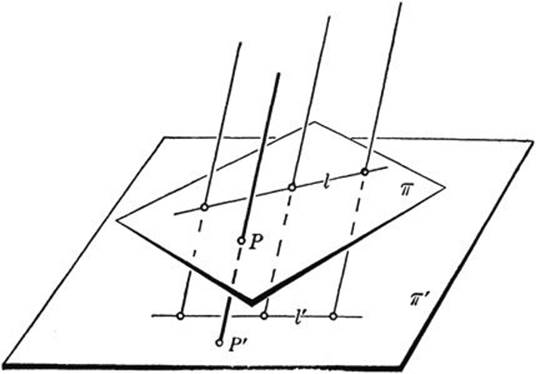
Fig. 71. Parallel projection.
Some projective properties can be recognized immediately. A point, of course, projects into a point. Moreover, a straight line is projected into a straight line; for, if the line l in π is projected onto the plane π′, the intersection of π′ with the plane through O and l will be the straight line l′‡If a point A and a straight line l are incident,†† then after any projection the corresponding point A′ and line l′ will again be incident. Thus the incidence of a point and a line is invariant under the projective group. From this fact many simple but important consequences follow. If three or more points are collinear, i.e. incident with some straight line, then their images will also be collinear. Likewise, if in the plane π three or more straight lines are concurrent, i.e. incident with some point, then their images will also be concurrent straight lines. While these simple properties—incidence, collinearity, and concurrence—are projective properties (i.e. properties invariant under projections), measures of length and angle, and ratios of such magnitudes, are generally altered by projection. Isosceles or equilateral triangles may project into triangles all of whose sides have different lengths. Hence, although “triangle” is a concept of projective geometry, “equilateral triangle” is not, and belongs to metric geometry only.
2. Desargues’s Theorem
One of the earliest discoveries of projective geometry was the famous triangle theorem of Desargues (1593–1662): If in a plane two triangles ABC and A′B′C′ are situated so that the straight lines joining corresponding vertices are concurrent in a point O, then the corresponding sides, if extended, will intersect in three collinear points. Figure 72 illustrates the theorem, and the reader should draw other figures to test it by experiment. The proof is not trivial, in spite of the simplicity of the figure, which involves only straight lines. The theorem clearly belongs to projective geometry, for if we project the whole figure onto another plane, it will retain all the properties involved in the theorem. We shall return to this theorem on page 187. At the moment we wish to call attention to the remarkable fact that Desargues’s theorem is also true if the two triangles lie in two different (non-parallel) planes, and that this Desargues’s theorem of three-dimensional geometry is very easily proved. Suppose that the lines AA′, BB′, and CC′ intersect at O (Fig. 73), according to hypothesis. Then AB lies in the same plane as A′B′, so that these two lines intersect at some point Q; likewise AC and A′C′ intersect in R, and BC and B′C′ intersect in P. Since P, Q, and R are on extensions of the sides of ABC and A′B′C,’ they lie in the same plane with each of these two triangles, and must consequently lie on the line of intersection of these two planes. Therefore P, Q, and R are collinear, as was to be proved.
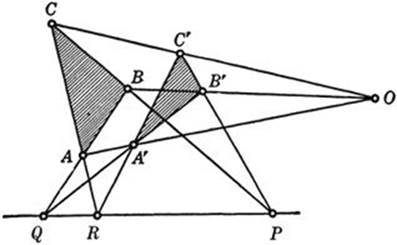
Fig. 72. Desargues’s configuration in the plane.
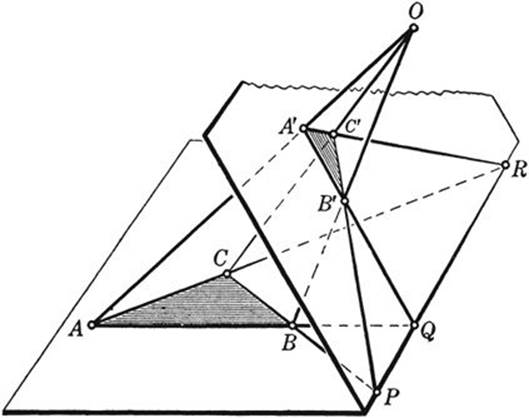
Fig. 73. Desargues’s configuration in space.
This simple proof suggests that we might prove the theorem for two dimensions by, so to speak, a passage to the limit, letting the whole figure flatten out so that the two planes coincide in the limit and the point O, together with all the others, falls into this plane. There is, however, a certain difficulty in carrying out such a limiting process, because the line of intersection PQR is not uniquely determined when the planes coincide. However, the configuration of Figure 72 may be regarded as a perspective drawing of the space configuration of Figure 73, and this fact can be used to prove the theorem in the plane case.
There is actually a fundamental difference between Desargues’s theorem in the plane and in space. Our proof in three dimensions used geometrical reasoning based solely on the concepts of incidence and intersection of points, lines, and planes. It can be shown that the proof of the two-dimensional theorem, provided it is to proceed entirely in the plane, necessarily requires the use of the concept of similarity of figures, which is based upon the metric concept of length and is no longer a projective notion.
The converse of Desargues’s theorem states that if ABC and A′B′C′ are two triangles situated so that the points where corresponding sides intersect are collinear, then the lines joining corresponding vertices are concurrent. Its proof for the case where the two triangles are in two non-parallel planes is left to the reader as an exercise.