What Is Mathematics? An Elementary Approach to Ideas and Methods, 2nd Edition (1996)
CHAPTER V. TOPOLOGY
INTRODUCTION
In the middle of the nineteenth century there began a completely new development in geometry that was soon to become one of the great forces in modern mathematics. The new subject, called analysis situs or topology, has as its object the study of the properties of geometrical figures that persist even when the figures are subjected to deformations so drastic that all their metric and projective properties are lost.
One of the great geometers of the time was A. F. Moebius (1790-1868), a man whose lack of self-assertion destined him to the career of an insignificant astronomer in a second-rate German observatory. At the age of sixty-eight he submitted to the Paris Academy a memoir on “one-sided” surfaces that contained some of the most surprising facts of this new kind of geometry. Like other important contributions before it, his paper lay buried for years in the files of the Academy until it was eventually made public by the author. Independently of Moebius, the astronomer J. B. Listing (1808-1882) in Goettingen had made similar discoveries, and at the suggestion of Gauss had published in 1847 a little book, Vorstudien zur Topologie. When Bernhard Riemann (1826-1866) came to Goettingen as a student, he found the mathematical atmosphere of that university town filled with keen interest in these strange new geometrical ideas. Soon he realized that here was the key to the understanding of the deepest properties of analytic functions of a complex variable. Nothing, perhaps, has given more impetus to the later development of topology than the great structure of Riemann’s theory of functions, in which topological concepts are absolutely fundamental.
At first, the novelty of the methods in the new field left mathematicians no time to present their results in the traditional postulational form of elementary geometry. Instead, the pioneers, such as Poincaré, were forced to rely largely upon geometrical intuition. Even today a student of topology will find that by too much insistence on a rigorous form of presentation he may easily lose sight of the essential geometrical content in a mass of formal detail. Still, it is a great merit of recent work to have brought topology within the framework of rigorous mathematics, where intuition remains the source but not the final validation of truth. During this process, started by L. E. J. Brouwer, the significance of topology for almost the whole of mathematics has steadily increased. American mathematicians, in particular O. Veblen, J. W. Alexander, and S. Lefschetz, have made important contributions to the subject.
While topology is definitely a creation of the last hundred years, there were a few isolated earlier discoveries that later found their place in the modern systematic development. By far the most important of these is a formula, relating the numbers of vertices, edges, and faces of a simple polyhedron, observed as early as 1640 by Descartes, and rediscovered and used by Euler in 1752. The typical character of this relation as a topological theorem became apparent much later, after Poincaré had recognized “Euler’s formula” and its generalizations as one of the central theorems of topology. So, for reasons both historical and intrinsic, we shall begin our discussion of topology with Euler’s formula. Since the ideal of perfect rigor is neither necessary nor desirable during one’s first steps in an unfamiliar field, we shall not hesitate from time to time to appeal to the reader’s geometrical intuition.
§1. EULER'S FORMULA FOR POLYHEDRA
Although the study of polyhedra held a central place in Greek geometry, it remained for Descartes and Euler to discover the following fact: In a simple polyhedron let V denote the number of vertices, E the number of edges, and F the number of faces; then always
(1) V – E + F = 2.
By a polyhedron is meant a solid whose surface consists of a number of polygonal faces. In the case of the regular solids, all the polygons are congruent and all the angles at vertices are equal. A polyhedron is simple if there are no “holes” in it, so that its surface can be deformed continuously into the surface of a sphere. Figure 120 shows a simple polyhedron which is not regular, while Figure 121 shows a polyhedron which is not simple.
The reader should check the fact that Euler’s formula holds for the simple polyhedra of Figures 119 and 120, but does not hold for the polyhedron of Figure 121.
To prove Euler’s formula, let us imagine the given simple polyhedron to be hollow, with a surface made of thin rubber. Then if we cut out one of the faces of the hollow polyhedron, we can deform the remaining surface until it stretches out flat on a plane. Of course, the areas of the faces and the angles between the edges of the polyhedron will have changed in this process. But the network of vertices and edges in the plane will contain the same number of vertices and edges as did the original polyhedron, while the number of polygons will be one less than in the original polyhedron, since one face was removed. We shall now show that for the plane network, V – E + F = 1, so that, if the removed face is counted, the result is V – E + F = 2 for the original polyhedron.

Fig. 119. The regular polyhedra.
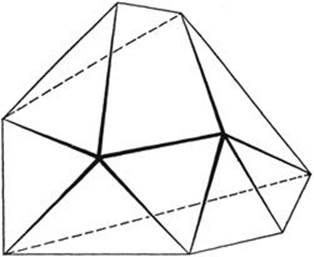
Fig. 120. A simple polyhedron. V – E + F = 9 – 18 + 11 = 2
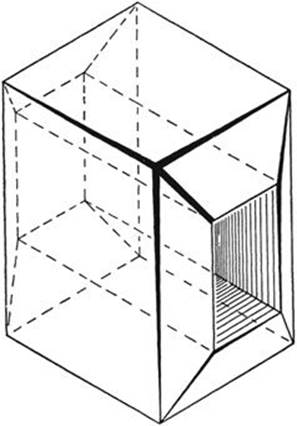
Fig. 121. A non-simple polyhedron. V – E + F = 16 – 32 + 16 = 0.
First we “triangulate” the plane network in the following way: In some polygon of the network which is not already a triangle we draw a diagonal. The effect of this is to increase both E and F by 1, thus preserving the value of V – E + F. We continue drawing diagonals joining pairs of points (Fig. 122) until the figure consists entirely of triangles, as it must eventually. In the triangulated network, V – E + F has the value that it had before the division into triangles, since the drawing of diagonals has not changed it. Some of the triangles have edges on the boundary of the plane network. Of these some, such as ABC, have only one edge on the boundary, while other triangles may have two edges on the boundary. We take any boundary triangle and remove that part of it which does not also belong to some other triangle. Thus, from ABC we remove the edge ACand the face, leaving the vertices A, B, C and the two edges AB and BC; while from DEF we remove the face, the two edges DF and FE, and the vertex F. The removal of a triangle of type ABC decreases E and F by 1, while V is unaffected, so that V – E + F remains the same. The removal of a triangle of type DEF decreases V by 1, E by 2, and F by 1, so that V – E + F again remains the same. By a properly chosen sequence of these operations we can remove triangles with edges on the boundary (which changes with each removal), until finally only one triangle remains, with its three edges, three vertices, and one face. For this simple network, V – E + F = 3 – 3 + 1 = 1. But we have seen that by constantly erasing triangles V – E + F was not altered. Therefore in the original plane network V – E + F must equal 1 also, and thus equals 1 for the polyhedron with one face missing. We conclude that V – E + F = 2 for the complete polyhedron. This completes the proof of Euler’s formula. (See (56), (57), pp. 496-7.)
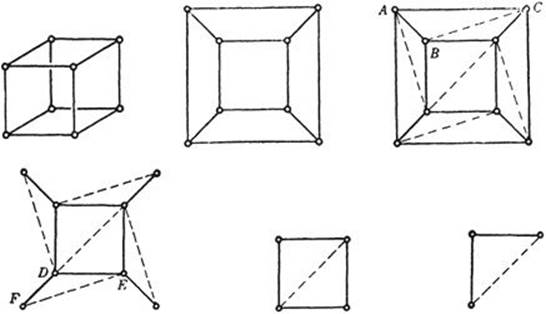
Fig. 122. Proof of Euler’s theorem.
On the basis of Euler’s formula it is easy to show that there are no more than five regular polyhedra. For suppose that a regular polyhedron has F faces, each of which is an n-sided regular polygon, and that r edges meet at each vertex. Counting edges by faces and vertices, we see that
(2) nF = 2E;
for each edge belongs to two faces, and hence is counted twice in the product nF; moreover,
(3) rV = 2E,
since each edge has two vertices. Hence from (1) we obtain the equation
![]()
or
(4) ![]()
We know to begin with that n > 3 and r > 3, since a polygon must have at least three sides, and at least three sides must meet at each polyhedral angle. But n and r cannot both be greater than three, for then the left hand side of equation (4) could not exceed ½, which is impossible for any positive value of E. Therefore, let us see what values r may have when n = 3, and what values n may have when r = 3. The totality of polyhedra given by these two cases gives the number of possible regular polyhedra.
For n = 3, equation (4) becomes
![]()
r can thus equal 3, 4, or 5. (6, or any greater number, is obviously excluded, since 1/E is always positive.) For these values of n and r we get E= 6, 12, or 30, corresponding respectively to the tetrahedron, octahedron, and icosahedron. Likewise, for r = 3 we obtain the equation
![]()
from which it follows that n = 3, 4, or 5, and E = 6, 12, or 30, respectively. These values correspond respectively to the tetrahedron, cube, and dodecahedron. Substituting these values for n, r, and E in equations (2) and (3), we obtain the numbers of vertices and faces in the corresponding polyhedra.