What Is Mathematics? An Elementary Approach to Ideas and Methods, 2nd Edition (1996)
CHAPTER VIII. THE CALCULUS
§7. DIFFERENTIAL EQUATIONS
1. Definition
The dominating rôle of the exponential and trigonometrical functions in mathematical analysis and its applications to physical problems is rooted in the fact that these functions solve the simplest “differential equations.”
A differential equation for an unknown function u = f(x) with derivative u′ = f′(x)—the notation u′ is a very useful abbreviation for f′(x) as long as the quantity u and its dependence on x as the function f(x) need not be sharply distinguished—is an equation involving u, u′, and possibly the independent variable x, as for example
u′ = u + sin (xu)
or
u′ + 3u = x2.
More generally, a differential equation may involve the second derivative, u″ = f″(x), or higher derivatives, as in the example
u″ + 2u′ – 3u = 0.
In any case the problem is to find a function u = f(x) that satisfies the given equation. Solving a differential equation is a wide generalization of the problem of integration in the sense of finding the primitive function of a given function g(x), which amounts to solving the simple differential equation
u′ = g(x).
For example, the solutions of the differential equation
u′ = x2
are the functions u = x3/3 + c, where c is any constant.
2. The Differential Equation of the Exponential Function. Radioactive Disintegration. Law of Growth. Compound Interest
The differential equation
(1) u′ = u
has as a solution the exponential function u = ex, since the exponential function is its own derivative. More generally, the function u = cex, where c is any constant, is a solution of (1). Similarly, the function
(2) u = cekx,
where c and k are any two constants, is a solution of the differential equation
(3) u′ = ku.
Conversely, any function u = f(x) satisfying equation (3) must be of the form cekx. For if x = h(u) is the inverse function of u = f(x), then according to the rule for finding the derivative of an inverse function we have
![]()
But ![]() is a primitive function of
is a primitive function of ![]() , so that
, so that ![]() , where b is some constant. Hence
, where b is some constant. Hence
log u = kx – bk,
and
u = ekx·e–bk
Setting e–bk (which is a constant) equal to c, we have
u = cekx,
as was to be proved.
The great significance of the differential equation (3) lies in the fact that it governs physical processes in which a quantity u of some substance is a function of the time t,
u = f(t),
and in which the quantity u is changing at each instant at a rate proportional to the value of u at that instant. In such a case, the rate of change at the instant t,
![]()
is equal to ku, where k is a constant, k being positive if u is increasing and negative if u is decreasing. In either case, u satisfies the differential equation (3); hence
u = cekt.
The constant c is determined if we know the amount u0 which was
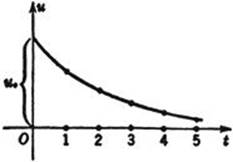
Fig. 279. Exponential decay. u = u0ekt, k < 0.
present at the time t = 0. We must obtain this amount if we set t = 0,
u0 = ce0 = c,
so that
(4) u = u0ekt.
Note that we start with a knowledge of the rate of change of u and deduce the law (4) which gives the actual amount of u at any time t. This is just the inverse of the problem of finding the derivative of a function.
A typical example is that of radioactive disintegration. Let u = f(t) be the amount of some radioactive substance at the time t; then on the hypothesis that each individual particle of the substance has a certain probability of disintegrating in a given time, and that the probability is unaffected by the presence of other such particles, the rate at which u is disintegrating at a given time t will be proportional to u, i.e. to the total amount present at that time. Hence u will satisfy (3) with a negative constant k that measures the speed of the disintegration process, and therefore
u = u0ekt.
It follows that the fraction of u which disintegrates in two equal time intervals is the same; for if u1 is the amount present at time t1 and u2 the amount present at some later time t2, then
![]()
which depends only on t2 – t1. To find out how long it will take for a given amount of the substance to disintegrate until only half of it is left, we must determine s = t2 – t1 so that
![]()
from which we find
(5) ![]()
For any radioactive substance, the value of s is called the half-life period, and s or some similar value (such as the value r for which u2/u1 = 999/1000) can be found by experiment. For radium, the half-life period is about 1550 years, and
![]()
It follows that
u = u0·e–0.0000447t.
An example of a law of growth that is approximately exponential is provided by the phenomenon of compound interest. A given amount of money, u0 dollars, is placed at 3% compound interest, which is to be compounded yearly. After 1 year, the amount of money will be
u1 = u0(1 + 0.03),
after 2 years it will be
u2 = u1(1 + 0.03) = u0(1 + 0.03)2,
and after t years it will be
(6) ut = u0(1 + 0.03)t.
Now if, instead of being compounded at yearly intervals, the interest is compounded after each month or after each nth part of a year, then after t years the amount will be
![]()
If n is taken very large, so that the interest is compounded every day or even every hour, then as n tends to infinity the quantity in the brackets, according to §6, approaches e0.03, and in the limit the amount after t years would be
(7) u0·e0.03t,
which corresponds to a continuous process of compounding interest. We may also calculate the time s taken for the original capital to double at 3% continuous compound interest. We have ![]() , so that
, so that ![]() . Thus the money will have doubled after about twenty-three years.
. Thus the money will have doubled after about twenty-three years.
Instead of following this step-by-step procedure and then passing to the limit, we could have derived the formula (7) simply by saying that the rate of increase u′ of the capital is proportional to u with the factor k = .03, so that
u′ = ku, where k =.03.
The formula (7) then follows from the general result (4).
3. Other Examples. Simplest Vibrations
The exponential function often occurs in more complicated combinations. For example, the function
(8) u = e–kx2,
where k is a positive constant, is a solution of the differential equation
u′ = –2kxu.
The function (8) is of fundamental importance in probability and statistics, since it defines the “normal” frequency distributions.
The trigonometric functions u = cos t, v = sin t also satisfy a very simple differential equation. We have first
u′ = –sin t = –v,
v′ = cos t = u,
which is a “system of two differential equations for two functions.” By differentiating again, we find
u″ = –v′ = –u,
v″ = u′ = –v,
so that both functions u and v of the time variable t can be considered as solutions of the same differential equation
(9) z″ + z = 0,
which is a very simple differential equation of the “second order,” i.e. involving the second derivative of z. This equation and its generalization with a positive constant k2,
(10) z″ + k2z = 0,
for which z = cos kt and z = sin kt are solutions, occur in the study of vibrations. This is why the oscillating curves u = sin kt and u = cos kt (Fig. 280) form the backbone of the theory of vibrating mechanisms. It should be stated that the differential equation (10) represents the ideal case, where there is no friction or resistance. Resistance is expressed in the differential equation of vibrating mechanisms by another term rz′,
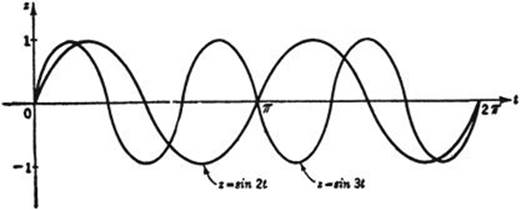
Fig. 280.
(11) z″ + rz′ + k2z = 0,
and the solutions now are “damped” vibrations, mathematically expressed by the formula
![]()
and graphically represented by Figure 281. (As an exercise the reader may verify these solutions by performing the differentiations.) The oscillations here are of the same type as those of the pure sine or cosine, but they are cut down in their intensity by an exponential factor, decreasing more or less rapidly according to the size of the friction coefficient r.
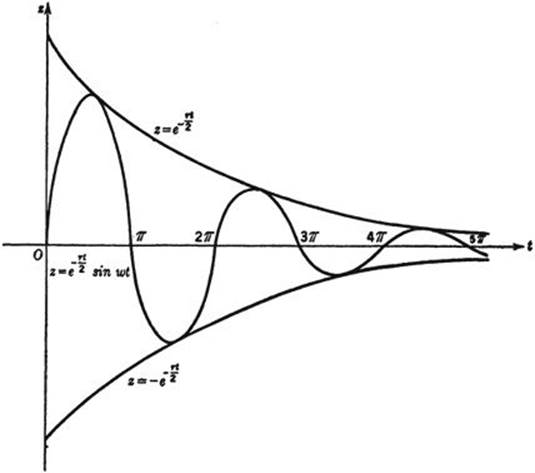
Fig. 281. Damped vibration.
4. Newton’s Law of Dynamics
Although a more detailed analysis of these facts is beyond our scope, we wish to bring them under the general aspect of the fundamental concepts with which Newton revolutionized mechanics and physics. He considered the motion of a particle with mass m and space coordinates x(t),y(t), z(t) which are functions of the time t, so that the components of the acceleration are the second derivatives, x″(t), y″(t), z″(t). The all-important step was Newton’s realization that the quantities mx″, my″, mz″ can be considered as the components of force acting on the particle. At first sight this might appear to be only a formal definition of the word “force” in physics. But Newton’s great achievement was to have shaped this definition in accordance with the actual phenomena of nature, inasmuch as nature very often provides a field of such forces which are known to us in advance without our knowing anything about the particular motion we want to study. Newton’s greatest triumph in dynamics, the justification of Kepler’s law for the motion of the planets, shows clearly the harmony between his mathematical concept and nature. Newton first assumed that the attraction of gravity is inversely proportional to the square of the distance. If we put the sun at the origin of the coördinate system, and if a given planet has the coördinates x, y, z, then it follows that the components of the force in the x, y, z directions are equal, respectively, to
![]()
where k is a gravitational constant not depending on the time, and ![]() is the distance from the sun to the planet. These expressions determine the local field of force, irrespective of the motion of a particle in the field. Now this knowledge of the field of forces is combined with Newton’s general law of dynamics (i.e. his expression for the force in terms of the motion); equating the two different expressions yields the equations
is the distance from the sun to the planet. These expressions determine the local field of force, irrespective of the motion of a particle in the field. Now this knowledge of the field of forces is combined with Newton’s general law of dynamics (i.e. his expression for the force in terms of the motion); equating the two different expressions yields the equations
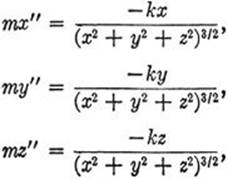
a system of three differential equations for three unknown, functions x(t), y(t), z(t). This system can be solved, and it turns out that, in accordance with Kepler’s empirical observations, the orbit of the planet is a conic section with the sun at one focus, the areas swept out by a line joining the sun to the planet are equal for equal time intervals, and the squares of the periods of complete revolution for two planets are proportional to the cubes of their distances from the sun. We must omit the proof.
The problem of vibrations provides a more elementary illustration of Newton’s method. Suppose that we have a particle moving along a straight line, the x-axis, and tied to the origin by an elastic force, such as a spring or a rubber band. If the particle is removed from its position of equilibrium at the origin to a position given by the coördinate x, the force will pull it back with an intensity that we assume proportional to the extension x; since the force is directed towards the origin, it will be represented by –k2x, where –k2 is a negative factor of proportionality expressing the strength of the elastic spring or rubber band. Furthermore, we assume that there is friction retarding the motion, and that this friction is proportional to the velocity x′ of the particle, with a factor of proportionality –r. Then the total force at any moment will be given by –k2x – rx′, and according to Newton’s general principle we find mx″ = – k2x – rx′ or
mx″ + rx′ + k2x = 0.
This is exactly the differential equation (11) of damped vibrations mentioned above.
This simple example is of great importance, since many types of vibrating mechanical and electrical systems can be described mathematically by exactly this differential equation. Here we have a typical instance where an abstract mathematical formulation bares with one stroke the innermost structure of many apparently quite different and unconnected individual phenomena. This abstraction from the particular nature of a given phenomenon to a formulation of the general law which governs the whole class of phenomena is one of the characteristic features of the mathematical treatment of physical problems.