The Handy Math Answer Book, Second Edition (2012)
GEOMETRY AND TRIGONOMETRY
GEOMETRY BEGINNINGS
What is geometry?
Geometry is the study of figures or objects in space—of a certain number of dimensions and types—and focuses on the properties and measurements of points, lines, angles, surfaces, and solids of those objects (or sometimes even the space around them). The word geometry is from the Greek words for “earth” and “to measure” (geometria, broken down into gë and metreein, respectively). A person who studies geometry is called a geometer or geometrician.
What are the divisions found within the field of geometry?
The geometry field has several distinct divisions, including:
Plane geometry—This includes common features such as circles, lines, triangles, and polygons.
Solid geometry—This also includes such figures as circles and lines, as well as polyhedrons.
Spherical geometry—This includes shapes such as spherical triangles (see below) and polygons.
Analytic geometry—Also called coordinate geometry, this includes the study of figures in terms of their positions, configurations, and separations.
There are other types of geometry, too, including projective geometry and non-Euclidean geometry. Most of these are more complex forms of geometry that each have their own special reasons for use.
When did geometry originate?
The field of geometry was probably developed by several cultures over millennia, but only in crude, elementary forms. Some of the first to actually work with geometry were the cultures of the Mesopotamian region around 3500 B.C.E. (especially the Babylonians). They were the earliest peoples to know about what is now called the Pythagorean theorem (in fact, the Greek mathematician and philosopher Pythagoras of Samos [c. 582-c. 507 B.C.E.] may have actually learned about this theorem in his travels to the east), and they possessed all the theorems of plane geometry that the Greeks attributed to Thales. The Egyptians came next, using geometric methods mainly for construction of huge monuments. This included the sundry pyramids and monuments of the region, some of which still dot the landscape today—a tribute to their builders who used geometric techniques.

The Greek mathematician Pythagoras may have learned about the geometric principals that led to his famous theorem during his travels to such places as Babylon.
Were the Greeks involved in geometry?
The Greeks were known to have extensive knowledge of geometry, producing many great geometers. With this and other contributions in mathematics, the Greeks profoundly changed the approach and character of the entire mathematical field. It is thought that Thales of Miletus (c. 625-c. 550 B.C.E.; Ionian) first introduced geometry to the Greeks. As a merchant traveler, he was exposed to the Babylonian concept of measurement, from which practices sprang geometry. Thales used his geometric knowledge to solve problems such as the height of the pyramids and the distance of ships from the shoreline.
Greek geometer Hippocrates of Chios (470-410 B.C.E.) was one of the first to present an axiomatic approach to geometry, as well as the first to work on the elements almost a century before Euclid (see below). Hippocrates may have worked on geometry and such problems as squaring the circle, but he lacked common sense and was duped by many people.
Zeno of Elea (c. 490-c. 425 B.C.E.) raised questions about lines, points, and numbers—all part of geometry—with his many paradoxes (for more information about Zeno and his paradoxes, see “Foundations of Mathematics”). Another important figure is Eudoxus of Cnidus (408-355 B.C.E.), who worked on geometric proportions and theories for determining areas and volumes.
What are the five postulates of Euclid?
Euclid was also famous for his postulates, propositions (statements) that are true without proof and deal with specific subject matter, such as the properties of geometric objects (for more information about postulates, see “Foundations of Mathematics”). Along with definitions, Euclid began his text Elements with five postulates. These postulates are as follows (some of which may seem obvious to us now, but in Euclid’s time they had yet to be formally recorded):
· It is possible to draw a straight line from any point to another point.
· It is possible to produce a finite straight line continuously in a straight line.
· It is possible to describe a circle with any center and radius.
· All right angles are equal to one another.
· Given any straight line and a point not on it, there “exists one and only one straight line which passes” through that point and never intersects the first line, no matter how far the lines are extended. Another way to say this is: One and only one line can be drawn through a point parallel to a given line. This is also called the parallel postulate.
Mathematicians first believed this last postulate could be derived from the first four, but they now consider it to be independent of the others. In fact, this postulate leads to Euclidean geometry, and eventually to many non-Euclidean geometries that are made possible by changing the assumption of this fifth postulate.
Like many early attempts at explaining mathematics, not all these postulates tell the entire geometric story. There were still a large number of gaps, many of which were gradually filled in over time.
Others followed these geometers, including Archimedes (c. 287-212 B.C.E.; Hellenic), who worked on mechanics and took the first steps toward integral calculus. Apollonius of Perga (262-190 B.C.E.), or the “great geometer,” first named and presented theories on conic sections in his book Conics, and he introduced the terms “parabola,” “ellipse,” and “hyperbola.” There was also Pappus of Alexandria (290–350), who presented the basis for modern projective geometry (the geometry that deals with incidences, or whether elements such as lines, planes, and points coincide or not).
What Greek mathematician wrote the book Elements?
The Greek mathematician and geometrician Euclid (c. 325-c. 270 B.C.E.) made some of the most significant improvements to geometry in his time. (For more about Euclid, see “History of Mathematics” and “Foundations of Mathematics.”) One contribution was his collection of 13 books on geometry and other mathematics, titled Elements (or Stoicheion in Greek). This work has been called the world’s most definitive text on geometry. The first six books offer elementary plane geometry, with sections on triangles, rectangles, circles, polygons, proportions, and similarities; the rest of the books present other mathematics of his day, including the theory of numbers (books 7 to 10), solid geometry, pyramids, and Platonic solids. These books were used for centuries in western Europe; in fact, the elementary geometry many students learn in high school today is still largely based on Euclid’s ideas on the subject.
What is Euclidean geometry?
Euclidean geometry is named after Euclid, the famous Greek mathematician. It is geometry mostly based on Euclid’s fifth postulate—the parallel postulate—and is sometimes called parabolic geometry. Plane geometry is described as two-dimensional Euclidean geometry, while three-dimensional Euclidean geometry is known as solid geometry.
What was François Viéte’s contribution to geometry?
French mathematician François Viète (or Franciscus Vieta, in Latin; 1540-1603), although thought of as the “founder of modern algebra,” also introduced a connection between algebra, geometry, and trigonometry. He also included trigonometric tables in his Canon Mathematicus (1571), along with the theory behind their construction. (For more about Viéte, see “History of Mathematics” and “Algebra.”)
French mathematician and physicist Gaspard Monge was the first to lay down ideas about modern descriptive geometry.
What was Gaspard Monge’s connection to geometry?
French mathematician, physicist, and public official Gaspard Monge (also known as Comte de Péluse; 1746-1818) was the first to lay down ideas about modern descriptive geometry, a field that is essential to mechanical and architectural drawing. He is also called the founder of differential geometry. As one of the founders of the école Polytechnique, he served as professor of descriptive geometry, and around 1800 published the first textbook on the subject based on his lectures, aptly called Géométrie descriptive. Today, the system once called “géométrie descriptive” is now known as orthographic projection, a graphical method used in modern mechanical drawing.
BASICS OF GEOMETRY
What is a mathematical space?
Outer space may be the “final frontier” to some people, but back on Earth there are also numerous types of space in mathematics. For the most part, mathematical space consists of points, sets, or vectors. Each space and the members of that space obey certain mathematical properties. Most spaces are named after their principal investigator, including Euclidean and Minkowski space. One of the most general types of mathematical spaces is called the topological space.
How is a dimension described in mathematics?
In mathematics, a dimension is the number of coordinates (or parameters) required to describe points of—or even points on—a mathematical object (usually geometric in nature). The dimension of an object is often referred to as its dimensionality. (For more about coordinates, see elsewhere in this chapter; for more about dimensions and science, see “Math in the Natural Sciences.”)
Each dimension represents points in space—from a single to multiple points. The concept of dimension is important in mathematics, as it defines a geometric object conceptually and/or visually. In fact, the idea of dimensions can even be applied to abstract objects that can’t be directly visualized. Mathematicians most often display such dimensions on graphs using a single point (for example, x) to represent one dimension; two points (usually x and y, or an ordered pair) to represent two dimensions; and three points (usually x, y, z) for three dimensions. The four- (and higher) dimensional analogs of three-dimensional objects often retain the prefix “hyper-” such as hypercube and hyperplane. The basic geometric structures of higher-dimensional geometry—the line, plane, space, and hyperspace—all consist of an infinite number of points arranged in specific ways.
What is Euclidean space?
Euclidean (also seen as Euclidian) space is often called Cartesian space, or more simply, n-space. It is made up of n dimensions and is a set of points, with each point represented by a coordinate of n components. Space with two to three dimensions—and that does not use Einstein’s and others’ ideas of relativistic physics—are considered Euclidean space.
How do we interpret dimensions in everyday life?
We are all familiar with dimensions around us, although we may not be aware of them. Most people are familiar with the ideas of two- (such as a drawing on paper) and three-dimensional objects (ordinary objects, including an apple or a car, exist in three-dimensional space), but there are others as well.
Zero dimension can be thought of as a point in space. One dimension can be visualized by a line or a curve in space. Another way of understanding one dimension is with time, something we think of as consisting of only “now,” “before,” and “after.” Because the “before” and “after”—regardless of whether they are long or short—are actually extensions, time becomes similar to a line (as in “timeline”)—or a one-dimensional object.
Two dimensions are defined by two coordinates in space, such as a rectangle. One of the most obvious two-dimensional objects we see all around us are paintings and photographs—although they represent a three-dimensional object. Even this page you are reading can be considered a two-dimensional object, though strictly speaking, the thickness of the paper gives it a third dimension. Three dimensions are considered the space we occupy, as three dimensions give everything around us depth. Our binocular vision allows us to see depth (things in three dimensions), which is why everything becomes “flat” or two-dimensional when we view the world through just one eye.
One can also conceive of four or more dimensions, but there are few common examples. Most hyper-dimensional aspects are used by mathematicians, various scientists, and even economists. They need such dimensional analysis for their complex mathematics, such as for modeling weather patterns or the ups and downs of the stock market.
In Euclidean space, distance is defined by certain “rules”: The distance between two points is positive, unless they are the same points; the distance from points a to b will be the same as from b to a; and the distance between the points does not change if they are totally shifted over in one direction (such a sliding over of the points is called translation; for more on this, see elsewhere in this chapter). In addition, the Pythagorean theorem is valid for three points that are the vertices (the intersection points of the sides of an angle) of a right triangle.
What are some of the basic “building blocks” of geometry?
There are several basic “building blocks” of geometry, all of which have to do with the objects we often see in geometry. A zero-dimensional object that is specifically located in n-dimensional space using n coordinates is called a point. The idea of a point may be obvious to most people, but for mathematicians, describing and dealing with points is not straightforward. For example, Euclid once gave a vague definition of a point as “that which has no part.”
How is a curve defined in geometry?
Acurve is a continuous collection of points drawn from one-dimensional space to n-dimensional space; it is also considered an object that can be created by moving a point. But note: Our usual use of the word “curve” does not mean a straight line, but in mathematics, a line or triangle is often referred to as a curve.
Different forms of geometry define curves in various ways. Analytic geometry uses plane curves—such as circles, ellipses, hyperbolas, and parabolas— which are usually considered as the graph of an equation or function. The properties of these curves are largely dependent on the degree of the equation in the case of algebraic curves (curves with algebraic equations) or on the particular function, as in the case of transcendental curves (curves whose equations are not algebraic). Even more complex are space curves, all of which require special techniques used only in differential geometry.
Euclid also called the line a “breadthless length,” and further called a straight line one that “lies evenly with the points on itself.” Modern mathematicians define lines as one-dimensional objects (although they may be part of a higher-dimensional space). They are mathematically defined as a theoretical course of a moving point that is thought to have length but no other dimension. They are often called straight lines, or by the archaic term, a right line, to emphasize the fact that there are no curves anywhere along the entire length. It is interesting to note that when geometry is used in an axiomatic system, a line is usually considered an undefined term (for more about axiomatic systems, see “Foundations of Mathematics”). In analytic geometry, a line is defined by the basic equation ax + by = c, in which a, b, and c are any number, but a and b can’t be zero at the same time.
A line segment is the shortest curve—which is actually straight—to connect two different points. It is a finite portion of an infinite line. Line segments are most often labeled with two letters corresponding to the endpoints of the line segment, such as a and b, and written as ab.
Distance is the length of the path between two points, or the length of a segment, for example, between points a and b. When talking about the distance between any two points associated with a and b (as real numbers) on a number line, distance becomes the absolute value of b - a (|b - a|).
Another basic building block is the ray. Think of a ray as a laser beam: It originates at one point and continues in one direction toward infinity. A ray is defined as part of a line on one side of a point, and includes that point. Two letters are needed to name a ray. For example, Ray AB is defined by point A, where it begins, and point B, the point the ray goes through. (But note: Ray AB is not the same as ray BA.) If the initial point is not included, the resulting figure is called a half line. In geometry, a ray is usually considered a half-infinite line with one of the two points A and B taken to be at infinity.
What does the word parallel mean in geometry?
In geometry, parallel means two lines in two-dimensional Euclidean space that do not intersect; or two lines in the same plane that never meet and that maintain the same distance from each other at every point. In three-dimensional Euclidean space, these lines also do not intersect, maintaining a constant separation between points closest to each other on the two lines. In analytic geometry, parallel means those lines with the same slope, as well as other curves with the same slope for every x value. The symbol for parallel lines is ![]() . For example, A
. For example, A ![]() B means that line A is parallel to line B.
B means that line A is parallel to line B.
What is an angle?
An angle is a major concept in both geometry and trigonometry. An angle is formed by two rays that begin at the same point; a straight angle is one in which the two rays lie on the same line. It can also be described as two planes coming from a common line.
Angles are named in several ways: a capital letter at its vertex (the common points for both rays, see illustration, ∠B), a small letter within the angle, a number within the angle, or by three capital letters (ABC or CBA, with the middle letter representing the vertex and the other two points the rays). The two rays that form the angle are called the sides of the angle, such as side BA and side BC.
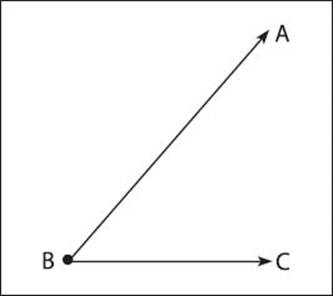
Angle ABC is formed by rays BA and BC linked at point B.
How are angles measured?
Angles are measured in two major ways: degrees and radians. Similar to degrees on a temperature scale, degrees in mathematics—especially when discussing angles—are usually denoted by the symbol °; they are divided into 60 arc minutes, and arc minutes are divided into 60 arc seconds. The multiples of 60 are thought to be connected to the Babylonian’s sexagesimal number system (one based on the number 60), in which the year was composed of 360 days (or 12 months at 30 days each). If the vertex of an angle and one side are fixed and the other side is rotated about the vertex, it sweeps out a circle of 360° with each complete rotation. Said another way, a full rotation is 360 degrees.
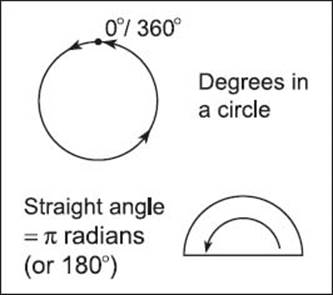
The angles of a circle are typically measured either in degrees or radians (rad). There are 360 degrees in a circle, or 2π × 1 rad.
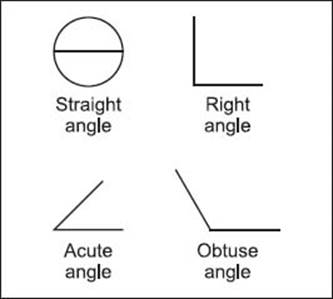
The four basic types of angles are straight, acute, obtuse, and right.
Radians (denoted as rad) are real numbers represented as an angle; they are the central angle of a circle determined by two radii and an arc joining them. In degrees, a radian is about 57.29578 degrees or 180/π degrees, because a semicircle contains π radians. For example, π/6 is equal to a 30 degree angle; because a straight angle is π radians (or 180°), if you divide 180 by 6, (or π/6), it is equal to 30 degrees. Radians are most often used in probability and statistics, or calculus, especially to obtain the derivative of trigonometric functions.
How are the simplest angles classified?
Angles are usually expressed in terms of “rotation,” in which a full rotation is equal— in most cases—to a 360 degree circle. Half of a full rotation is called a straight angle; a quarter of a full rotation is called a right angle (90 degrees). An angle less than a right angle is called an acute angle; an angle greater than a right angle is called an obtuse angle.
What are other types of angles?
There are numerous other types of angles, some of which are examined in the following list:
Adjacent angle—Adjacent angles are two angles side-by-side that have a common vertex (endpoint) and ray; angles are adjacent if a common line is between the other sides.
Vertical angles—Vertical angles are two angles whose sides form two pairs of opposite rays; because of this, vertical angles have no sides in common and are directly across from one another. They are also considered a pair of opposite congruent angles where two lines intersect. Vertical angles include intersecting lines that define a plane, with the vertical angles always in the same plane.
Congruent angles—Congruent angles have the same size and shape; vertical angles are considered to be congruent.
Exterior and interior angles—Interior angles are those inside a polygon, such as a triangle; exterior angles are outside the polygon formed by extending one ray (side) outside the polygon from a vertex.
Alternate and corresponding angles—A pair of angles that lie on opposite sides and opposite ends of a transversal (a line that cuts two or more lines in the same plane) are called alternate angles; both these angles are equal if the lines cut by the transversal are parallel. They are also broken into alternate interior angles (the “inside” angles) and alternate exterior angles (the “outside” angles). For two parallel lines, the alternate interior and exterior angles are equal—or congruent. Corresponding angles are pairs of angles that lie on the same sides and ends of a transversal.
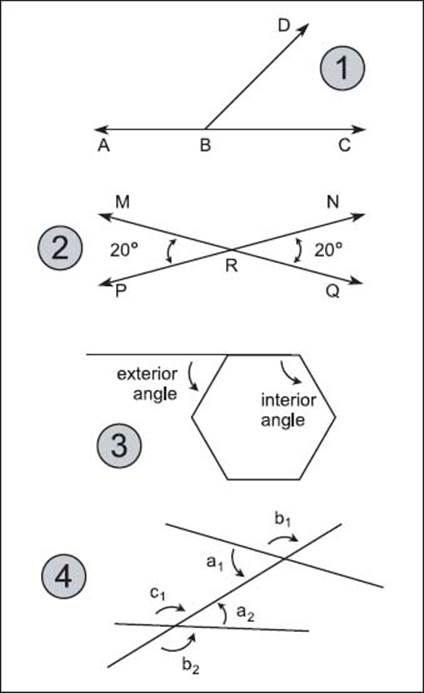
Among the types of angles are: 1. adjacent angles; 2. vertical (congruent) angles; and 3. exterior and interior angles. In illustration 4 we see alternate interior angles (a1 and a2), alternate exterior angles (b1 and b2), and corresponding angles (b1 and c1).
Dihedral angle—A dihedral (meaning “two bases”) angle is one of the four angles formed where two non-parallel planes meet.
Complementary angles—Two angles that add up to a right angle are complementary. For example, the two acute angles in a right triangle are always considered complementary, as their sum adds up to 90 degrees of the right triangle.
Supplementary angles—Two angles that add up to a straight angle (180 degrees) are supplementary. If the angles are both supplementary to the same angle, then the two angles are congruent.
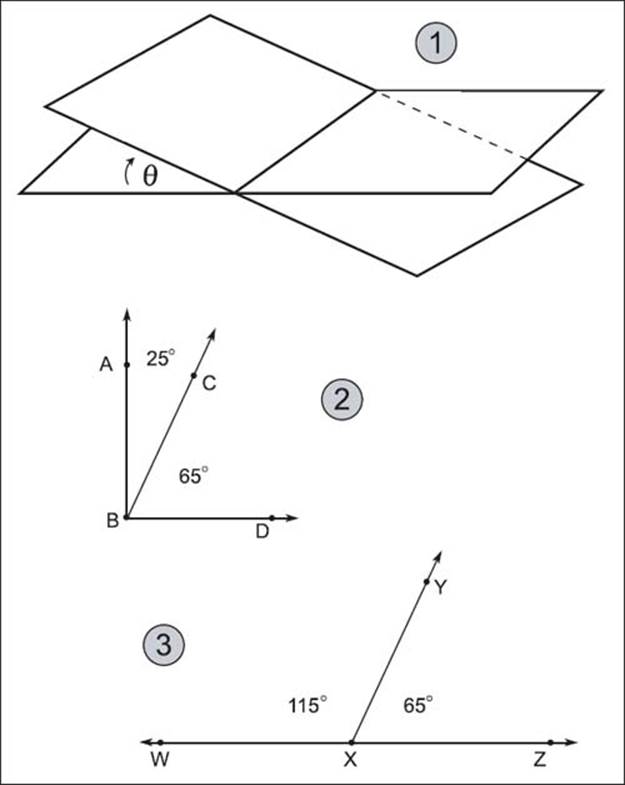
In the above, illustration 1 shows dihedral angle 6; illustration 2 shows complementary angles; and illustration 3 shows supplementary angles.
What are perpendicular, orthogonal, normal, and tangent lines?
Lines are also classified by their relationship to other angles and lines. Perpendicular lines are two lines, segments, or rays that intersect to form a right (90 degree) angle. Orthogonal lines are another way of saying lines are perpendicular—but it is mostly used in terms of functions, transformations, and vectors in other mathematical fields. Normal lines are perpendicular lines where each line is perpendicular to a curve (including a line) or a surface (including a plane). And finally, a line is considered to be tangent to a circle if it intersects the circle at exactly one point—also called the point of tangency. Such lines are also called tangential lines.
What does the term bisect mean?
The term “bisect” is important in geometry; it means to cut into two (or divide into half), mainly lines (or two-dimensional figures) and angles. To compare, a bisected line segment means finding the plane, line, or point that is the midpoint of the line segment. This is also called a segment bisector. An angle bisector is a ray in the interior of an angle that forms two equal angles. First locate the point on each ray that is equally distant from the vertex; then draw a third point equally distant from each of the first two rays. A line that extends through the third point and the vertex is the angle bisector.
To draw a bisector, follow the following sequence (as per the illustration): First, draw an angle; then draw an arc centered at the vertex (endpoint), in which B and C are the intersections of the arc and angle lines at equal distances from the vertex; next draw an arc centered at B and one centered at C—both with the same radii—inside the angle; finally, extend a line from the vertex to the point D where the arcs of B and C intersect—making AD the bisector of the angle at A.
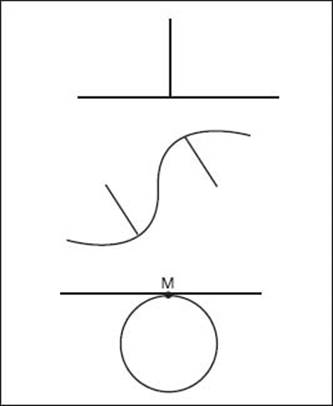
Examples of a perpendicular line (top), normal lines (middle), and tangential lines (bottom), with point M being the point of tangency.
What are geometric postulates?
Similar to other parts of mathematics, there are many geometric postulates, or statements that are assumed to be true without proof. From these postulates, theorems—another type of mathematical statement—can be proven (in addition, theorems are proven by definitions or previously proven theorems). An example of a postulate in geometry is, “Through any two points there is exactly one line.” Another is, “If two points lie in a plane, then the entire line containing those two points lies in the plane.”

To determine a bisector, follow these steps from top to bottom: Draw an angle; draw an arc from the angle’s vertex that touches the two angle lines; draw two more arcs from the points where the first arc meets the angle lines; draw a line from point A to point D.
What are proofs and theorems in geometry?
Proofs are extremely important to geometry. Similar to other divisions of mathematics, proofs are defined as sequences of justified conclusions used to prove the validity of an “if-then” statement. (For more information about postulates, theorems, and undefined terms, see “Foundations of Mathematics.”)
There are essentially five steps in showing that any proof is a good proof: state the theorem to be proved; list what information is available; draw an illustration (if possible) to represent the information; state what is to be proved. Finally, develop a system of deductive reasoning, especially concentrating on statements that are accepted to be true; along with the true statements, add any necessary undefined terms.
In geometry, in order to prove a theorem, you need to use definitions, properties, rules, undefined terms, postulates, and (possibly) other theorems. And like hyperlinking to other text with Internet links, such theorems can be used throughout geometry (and other mathematics) in the proofs of other new, more difficult theorems.
What is an indirect proof?
Direct proofs start with a true statement and then set out to prove that a conclusion is true. But there is also a method called the indirect proof in which indirect reasoning is used. First, assume that the conclusion is false; then show that this assumption leads to a contradiction of the hypothesis or some other accepted fact, such as a postulate or theorem. Therefore, if the assumption is proved false, the conclusion has been proved—indirectly—to be true.
PLANE GEOMETRY
What is plane geometry?
Plane geometry is simply the study of two-dimensional figures in a plane. Most mathematicians further define the plane as Euclidean (for more information about Euclidean geometry, see above). It examines such objects as circles, lines, and polygons.
What does a “plane” mean in geometry?
A plane—in geometry or any other field of mathematics—means a surface such that a straight line joining any two of its points lies totally in that surface. A plane is considered to be two-dimensional; when a plane is discussed with higher dimensions, it is called a hyperplane. Thus, in the majority of mathematical discussions, a plane can be thought of as a two-dimensional group of points that reach out to infinity in all directions (for more information about dimensions, see above).
How is the term “surface” used in mathematics?
When most of us think of the word “surface” we often envision our own world—the thin outer crust of soil and rock we walk and live on. In engineering, the term means the outer part (or the skin with a thickness of zero) of a body. In science it can apply to a plethora of objects, from geologic structures to micrometer-sized particles.
In mathematics, “surface” also has numerous meanings. The most common denotes a two-dimensional topological space or three-dimensional Euclidean space. A surface in mathematics can be complicated and complex, such as in certain fractals, or extremely simple, such as in a plane.
What is a polygon?
The word polygon means “many angles” (Greek poly for “many”; gonis for “angle”). It is a closed figure in a plane made up of line segments (straight with no curves) that intersect only at their vertices (endpoints). In other words, no sides (lines) can touch each other except at endpoints. A polygon has the same number of sides as it has vertices.
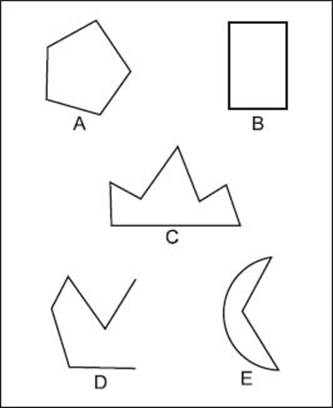
Examples A, B, and C above are polygons, while examples D and E are not.
What are the names given to regular polygons?
Polygons are classified according to the number of sides they have. A polygon with n sides is called an n-gon. The following lists some of the names of polygons, depending on the number of sides. It is also possible to substitute “n-gon,” when the name is not known (for example 14-gon or 20-gon).
Names for Regular Polygons
|
Sides |
Polygon Name |
|
3 |
trigon or triangle |
|
4 |
quadrilateral or tetragon |
|
5 |
pentagon |
|
6 |
hexagon |
|
7 |
heptagon |
|
8 |
octagon |
|
9 |
nonagon or enneagon |
|
10 |
decagon |
|
11 |
hendecagon or undecagon (even less frequently as unidecagon) |
|
12 |
dodecagon |
|
13 |
tridecagon or triskaidecagon |
|
14 |
tetradecagon or tetrakaidecagon |
|
15 |
pentadecagon or pentakaidecagon |
|
16 |
hexadecagon or hexakaidecagon |
|
17 |
heptadecagon or heptakaidecagon |
|
18 |
octadecagon or octakaidecagon |
|
19 |
enneadecagon or enneakaidecagon |
|
20 |
icosagon |
|
30 |
triacontagon |
|
40 |
tetracontagon |
|
50 |
pentacontagon |
|
60 |
hexacontagon |
|
70 |
heptacontagon |
|
80 |
octacontagon |
|
90 |
enneacontagon |
|
100 |
hectogon or hecatontagon |
|
1,000 |
chiliagon |
|
10,000 |
myriagon |
Some texts list a two-sided polygon as a “digon,” but this is only meant for theoretical mathematics. If you feel like making up your own name, try constructing some sided polygons. For example, a 46-sided polygon could be called a tetracontakai-hexagon, or a combination of “tetracon-tagon” + “kai” (often used in combining names) + “hexagon.” To shorten such long names, mathematicians often use “n-gon” to simplify matters; thus, 46 would be 46-gon a much easier name to remember and even say.
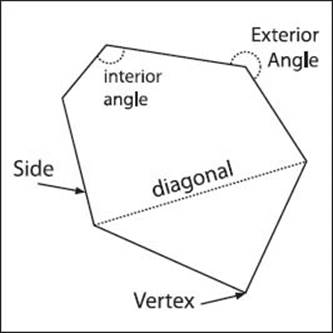
The parts of a polygon.
What are some divisions of polygons?
There are two major divisions of polygons: Regular polygons are convex polygons with equal sides and length; thus, all sides and angles are congruent (equal). For example, one of the most famous regular octagons is the stop sign used along roads in the United States: a closed polygon with eight equal sides. The naming of the various polygons can be challenging, though. For example, a polygon called a regular triangle is also called an equilateral triangle; another name for the polygon called a regular quadrilateral is a square. Irregular polygons are those with sides of differing lengths and variable angles. Therefore, unless all the sides of the polygon are of the same length and all the angles are of the same measure, the polygon is said to be irregular.
But don’t be fooled: The names for the various polygons—such as hexagon, nonagon, and pentagon, depending on number of sides—don’t just apply to the regular polygons, but rather to any two-dimensional closed figure with the number of sides as described by its name. For example, the two figures shown on page 185 are both polygons—A is a regular hexagon and B is an irregular hexagon.
Polygons are described in other ways, too. Convex polygons are those in which every line drawn between any two points inside the polygon lie entirely within the figure. Opposite from the convex polygons are the concave polygons—those that are essentially “caved in,” with some of the sides bent inward. If a line is drawn between two points inside a concave polygon, the line often passes outside the figure. Another type of polygon is a star polygon,in which a star figure is drawn based on equidistant points connected on a circle.
What are triangles and how are they classified?
Triangles (or “three angles”) are polygons with three sides. A triangle’s three line segments (or sides) are joined together at three vertices (endpoints). For all triangles, the sum of a triangle’s three interior angles is equal to a straight angle, or 180 degrees.
Triangles are classified by either the lengths of their sides, or, more commonly, the measurement of their angles. All triangles have at least two acute angles, but the third angle, which can be used to classify the triangle, can be acute, right, or obtuse (for more about these angles, see above). The types of triangles based on angles are:
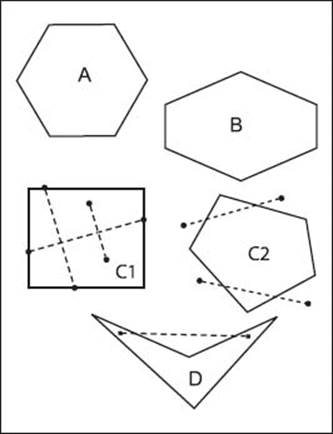
Types of polygons include regular hexagons (A), irregular hexagons (B), convex polygons (C1 and C2), and concave polygons (D).
Right triangle—There is one angle of 90 degrees.
Acute triangle—All three angles are less than 90 degrees, or the triangle has three acute angles.
Obtuse triangle—There is one angle greater than 90 degrees, or the triangle has one obtuse angle.
Equiangular triangle—An acute triangle in which all angles are congruent, or when all three angles are equal.
Triangles can be further classified by their sides, as in the following:
Scalene triangle—There are no sides—and therefore no angles—that are equal; in other words, no sides are congruent.
Isosceles triangle—Two of the sides are equal (congruent), and thus the base angles are equal.
Equilateral triangle—When all three sides are equal (congruent).
What are the parts of right and isosceles triangles?
There are special names for the parts of a right triangle. The hypotenuse is the side opposite the 90 degree angle—the side that will always be the triangle’s longest. The shorter sides are called the legs.
Similar to the right triangle, the isosceles triangle has specific names for its angles and sides: Congruent (equal) sides are, as with the right triangle, called the legs; the angle formed by these two legs is called the vertex angle;and the base is the side opposite the vertex angle. The two angles that are formed by the base and the legs are called the triangle’s base angles.
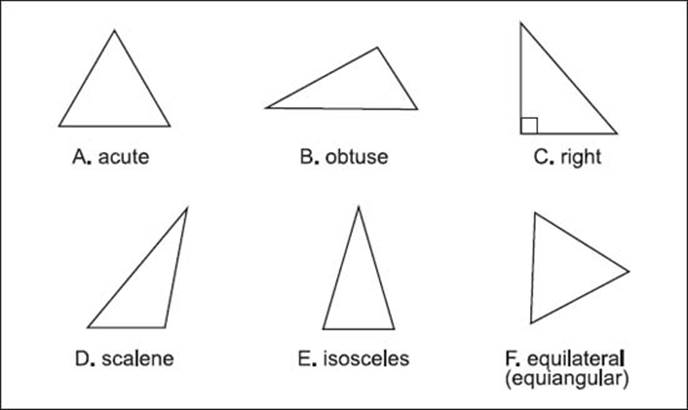
The basic types of triangles are acute (A), obtuse (B), right (C), scalene (D), isosceles (E), and equilateral (F).
How is the Pythagorean theorem connected to right triangles?
The Pythagorean theorem deals with right triangles: Simply stated, the sum of the squares of the legs equals the square of the hypotenuse (longest side). The converse of the Pythagorean theorem is also true: If the sum of the squares of a triangle’s two sides equals the square of the longest side, then the triangle is a right triangle. (For an illustration of the Pythagorean theorem, see “History of Mathematics.”)
What are the various types of quadrilaterals?
There are several types of quadrilaterals: polygons with four sides. Interestingly enough, some definitions can be “combined”; for example, if a quadrilateral is both a rhombus and a rectangle, it is truly a square. The following lists the common quadrilaterals:
Square—The most obvious quadrilateral is the square. It is an equiangular quadrilateral with four right angles (it is also defined as having four congruent sides).
Rectangle—The second most well-known quadrilateral is the rectangle, a quadrilateral with four right angles, with the opposite sides parallel and congruent, and opposite angles congruent.
Parallelogram—A parallelogram is a quadrilateral with both pairs of opposite sides parallel; thus, opposite sides and angles are congruent.
Rhombus—A rhombus is a parallelogram with four equilateral (or congruent) sides.
Trapezoid—A trapezoid is a quadrilateral with exactly one pair of parallel sides. This is also seen in books as “a quadrilateral with at least one pair of parallel sides,” but this latter definition is often debated among mathematicians, as the meaning is not the same as the first statement. With trapezoids, the parallel sides are called the bases; the nonparallel sides are called the legs.
Isosceles trapezoid—An isosceles trapezoid is one with nonparallel sides that are equal in length, or a trapezoid with a pair of equiangular base angles. The legs of an isosceles trapezoid are congruent. (For more about these figures, see elsewhere in this chapter.)
What is a circle?
A circle is one of the most fundamental shapes in geometry—and one shape we commonly see every day. For mathematicians, a circle is defined as a set of points on a plane at a certain distance from a center point. In reality, a circle is a polygon with an infinite number of sides.
The distance of a line segment from the center to the points on the circle is called the radius (or a line segment whose endpoints are on any point on the circle and its center). A line segment that travels from one endpoint on the circle, through the radius (center of the circle), and to another endpoint directly opposite is called the diameter; two times the radius of a circle is the diameter. The outer perimeter of the circle is called the circumference. The chord of a circle is a line segment whose two endpoints are on the circle. Concentric circles are two or more circles that lie in the same plane and have the same center, but with different radii. Circles with the same radius are called congruent circles. (For more about circle measurements, see elsewhere in this chapter.)
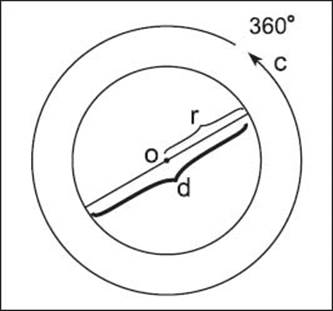
The parts of a circle include the center (o), radius (r), diameter (d), and circumference (c).
Why are arcs and angles important to circles?
Everything starts with the angle whose vertex is at the center of the circle (logically called the central angle of a circle). All the central angles of a circle add up to 360 degrees. Every central angle cuts the circle into two arcs: the minor arc (always less than 180 degrees) and the major arc (always more than 180 degrees). Thus, the measure of the minor arc is actually the measurement of the central angle, while the measurement of the major arc is 360 degrees minus the measure of the central angle. An arc length is the distance between an arc’s endpoints along the path of the circle. Congruent arcs are arcs with the same measurements. When the diameter of a circle separates the circle into two congruent arcs it is called a semicircle.
What is the congruent problem?
It may not be something that kept you up at night, but the congruent problem has finally been solved—at least the first one trillion cases. Simply stated, the problem concerns the areas of right-angled triangles to determine which whole numbers can be the area of a right-angled triangle whose sides are whole numbers or fractions. In fact, the area of such a triangle is simply called a congruent number.” For instance, the area of a 3-4-5 right triangle is 0.5 × 3 × 4 = 6, with 6 being the congruent number.
The problem is an ancient one, and like many “Holy Grails” of mathematics, this problem was first stated centuries ago by astute mathematicians—this time, Persian mathematician al-Karaji (for more about al-Karaji, see “History of Mathematics”). In 1225, Fibonacci (for more about Fibonacci, see “History of Mathematics” and “Mathematics throughout History”) also tried to work on the problem. Many other mathematicians followed, but it took until around 2009 for an international team of mathematicians, using state-of-the-art computer techniques, to find the first trillion congruent numbers.
In order, the first few congruent numbers known are 5, 6, 7, 13, 14, 15, 20, 21, and so on. But, as one can imagine, there are so many more such numbers. The researchers were able to figure out a computer compilation method that would allow them to not only find but also verify more congruent numbers. They found 3,148,379,694 congruent numbers up to a trillion. The mathematicians were no doubt grateful for the computers, too. According to some researchers, the numbers involved are so huge that if they were written by hand, the numbers would stretch to the Moon and back.
SOLID GEOMETRY
What is solid geometry?
Solid geometry is the study of objects in three-dimensional Euclidean space. It deals with solids, as opposed to plane geometry, which deals with two dimensions. This part of geometry is concerned with entities such as polyhedra, spheres, cones, cylinders, and so on. (For more about Euclidean space and dimensions, see elsewhere in this chapter.)
In geometry, solids are defined as closed three-dimensional figures, or any limited portion of space bounded by surfaces. They differ in subtle ways from what we perceive as solids: We see solids in terms of what surrounds us—three-dimensional figures with their surfaces the actual objects we perceive. Geometric solids are actually the union of the surface and regions of space; in a way, this adds another dimension to two-dimensional space.
What is a polyhedron?
The word polyhedron comes from the Greek poly (meaning “many”) and the Indo-European word hedron (meaning “seat”). In geometry, a polyhedron is considered to be a three-dimensional solid that represents the union of polygonal regions, usually joined at their edges and having no gaps.
Polyhedrons are classified as convex, or if you extend any side, the figure lies on only one side of the plane (for example, a pyramid and cube); a concave polyhedron is one that can extend on both sides of such a plane (for example, a form that exhibits concavity on one or all sides of the polyhedron). The plural of polyhedron is often seen as “polyhedrons,” but it is more correct to use “polyhedra.”
What are the various types of polyhedra?
As with most forms, polyhedra are divided into many names, depending on the number of faces. The following lists some of them, based on their number of sides:
Types of Polyhedra
|
Sides |
Polyhedra Name |
|
4 |
tetrahedron |
|
5 |
pentahedron |
|
6 |
hexahedron |
|
7 |
heptahedron |
|
8 |
octahedron |
|
9 |
nonahedron |
|
10 |
decahedron |
|
11 |
undecahedron |
|
12 |
dodecahedron |
|
14 |
tetradecahedron |
|
20 |
icosahedron |
|
24 |
icositetrahedron |
|
30 |
triacontahedron |
|
32 |
icosidodecahedron |
|
60 |
hexecontahedron |
|
90 |
enneacontahedron |
How are some common solids defined?
There are numerous objects defined in solid geometry. The following lists the most common (and some interesting) ones:
Cone—A cone can be both a surface and a solid. A solid cone is bounded by a region enclosed in a closed curve on a plane and a surface formed by segments joining each point of the closed curve to a point that is not in the plane. (Note: Two solid cones seen with their pointed ends together help define conic sections; for more about conic sections, see elsewhere in this chapter.)
Pyramid—A pyramid is a polyhedron (see above) with one face a polygon and all other faces as triangles with a common endpoint (vertex). They are named based on the polygon’s base, such as the triangular pyramid, square pyramid, and so on. Some of the most famous “solid pyramids” are the sandstone pyramids of Egypt. These are actually called right square pyramids because the base of the polygon is a square and the vertical line from the vertex meets the center of the base.
Cylinder—A cylinder can be both a surface and a solid. A solid cylinder is one that forms by rotating a circle about an axis through the midpoints of the opposite side; it is also called a right circular cylinder. One of the most well-known cylinders is possibly sitting right next to you: A coffee cup, with its cylindrical shape, and the bases (in this case, the base and rim) considered to be congruent circles.
Prism—A prism is a polyhedron with two parallel, congruent faces that make up the bases of the shape; the other, lateral faces are considered to be parallelograms. If the lateral faces are rectangles, the prism is called a right prism.
Parallelepiped—This strange-sounding polyhedron is one that has all its faces as parallelograms, or a prism with parallelogram bases. The most familiar parallelepiped is a simple box—also called a rectangular parallelepiped—that has rectangles for all the six faces. (For more about these figures, including how to calculate their areas, see elsewhere in this chapter.)
What are the Platonic solids?
Platonic solids are also called regular solids, regular figures (a term also used in reference to polygons), regular polyhedra, or “cosmic figures.” These solids are convex polyhedra that have equal faces made up of congruent convex regular polygons. (To compare in terms of a two-dimensional polygon, a regular figure means that both the sides and the angles between them are equal.)
The Greek philosopher Plato first described what are now called platonic solids, polyhedra with equal faces made up of congruent convex regular polygons.
There are considered to only be five of these solids: the cube, dodecahedron icosahedron, octahedron, and tetrahedron. These solids were described by Greek philosopher Plato (c. 428-348 B.C.E.) in his work Timaeus—thus the name Platonic solids. His definitions were certainly more whimsical than today’s, as he believed the major “elements” were made up of atoms shaped like certain polyhedra. He associated the tetrahedron with the “element” fire, the cube with the earth, the icosahedron with water, the octahedron with air, and the dodecahedron with the material that makes up the constellations and heavens. The mathematical proofs of these solids were worked out long ago by Greek mathematician and geometrician Euclid (c. 325-c. 270 B.C.E.) in the last part of his Elements (for more information about Euclid, see elsewhere in this chapter, as well as “Foundations of Mathematics”).
How are spheres described?
A sphere in solid geometry is considered to be the set of points (or the “skin” of the sphere) in three-dimensional Euclidean space that are equidistant from the sphere’s singular, central point. Or, more simply, a sphere is a perfectly round, three-dimensional object. The term “sphere” also extends into other dimensions; for example, a sphere in two dimensions is also called a circle.
What is spherical geometry?
Spherical geometry is the study of objects on the surface of a sphere; this differs from the type of geometry studied in plane or solid geometry. In spherical geometry, there are no parallel lines, and straight lines are actually great circles, so any two lines meet in two points. In addition, the angle between two lines is the angle between the planes of the corresponding great circles. There are also entities called spherical triangles (or Euler triangles), when three planes pass through the surface of a sphere and through the sphere’s center of volume; they have three surface angles and three central angles. There are also spherical polygons, in which a closed geometric object on the surface of a sphere is formed by arcs of great circles.
MEASUREMENTS AND TRANSFORMATIONS
What is the perimeter of a two-dimensional geometric figure?
The perimeter of a two-dimensional figure is what we perceive as the “outside” of the object. Mathematicians describe a perimeter more precisely as the sum of the lengths of a polygon’s sides; the perimeter of a simple closed curve is measured as its length.
What is the area of a two-dimensional geometric figure?
The area of two-dimensional figures varies depending on the object. For the simpler two-dimensional figures (square, rectangle, parallelogram), the area can actually be found by calculating the number of square units in the interior of the object. Such a task can be difficult and time consuming, so mathematicians simply multiply the height (h) times the base (b), sometimes said as length times height or length times width (with rectangles). (For more information about the area of geometric figures, see the Appendix 2: Common Formulas for Calculating Areas and Volumes of Shapes).
How is the area determined for some common two-dimensional polygons?
Finding the areas of polygons is not as simple as determining the areas of a rectangle and square. In order to find the area of certain polygons, one essentially “breaks the shape down” into smaller shapes with simpler formulas; these types of shapes are called composites. The formulas for many of these polygons are all adaptations from the rectangle area formula—or height (h) times base (b). For example, a triangle is actually exactly half of a rectangle. Thus, the formula to find the area of a triangle is half the base times the height (1/2bh). In the case of the trapezoid, the figure can be divided into triangular sections, with the area equal to one half times the two bases times the height, or ½(B + b)h.
The triangle formula also is used to find other regular polygon areas, but they are less obvious. For a regular polygon, a feature called the apothem is necessary for finding the area. This is the height of one of the congruent triangles inside the regular polygon. In general, to find the polygon’s area, you need to find the area of one triangle and multiply it times the number of sides. For example, to find the area of a hexagon, divide the figure into six triangles, each with l equal to the height of each interior triangle or apothem; l is also half of the smallest interior dimension of the hexagon, called w. Thus, the area of a hexagon is the square root of 3 divided by 2 times w squared (or ![]() ).
).
How is the term “surface area” used in geometry?
Logically, the surface area is the area of a given surface. There are several ways to interpret this in geometry: Area can mean the extent of the surface region on a two-dimensional plane. Surface area (often called the lateral surface area, although there is a difference) formulas for three-dimensional objects are more complex—all the surface areas are added around the outside of the object, from a cube to a sphere.
Surface area is commonly denoted as S for a surface in three dimensions, and A for the surface area of a two-dimensional plane (commonly, it is simply called “the area”). But be careful: The surface area of a three-dimensional object should not be confused with “volume”—or the total amount of space an object occupies. (For more about volume, see below.)
There is still another way to determine the area of a polygon by using the Pythagorean theorem, a method that uses length and height, with the resulting formula for the area of a polygon looking much different. Both methods give the same results in numerical terms. For example, the area of a hexagon using the smallest interior dimension would be 0.866 times the square of the smallest width, w; the area of a regular hexagon using the Pythagorean theorem is 2.598 times the square of its side length. These may be different ways of presenting the solution, but both give the same correct area measurements.
What are the measurements of a circle?
There are many measurements of a circle. The perimeter of a circle is actually called the circumference; to calculate this, multiply pi (π) times the diameter, d (πd), or pi (π) times twice the radius, r (2πr). The area of a circle is calculated by multiplying pi (π) times the radius squared, or πr2.
How was the area of a circle first determined?
When it comes to determining the area of a circle, there are many historical claims to this solution. One of the earliest techniques may have been the Chinese “comb” method, in which a circle is cut into n wedges, each 360/ndegrees and each piece identical (with the same area). To see how this works, take the bottom half of a unit circle and cut it into wedges like slices of a pie; place all the wedges next to each other, with the points up (like the teeth of a comb or animal). Then split the top half of the circle in the same way, putting them next to each other above the other wedges, but this time point the tips of the wedges down. Close the “teeth”; as n goes to infinity, the shape of the combined wedges approaches a rectangle. Taking the formula for determining the area of a rectangle (width times height), the width is πr (or half the circumference) and the height is r. Thus, the area is πr2.
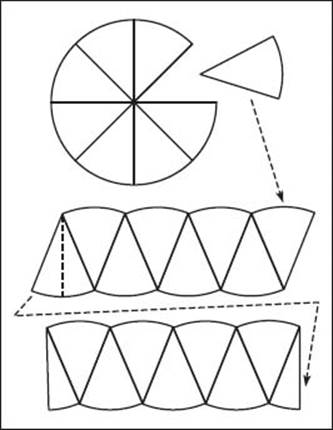
To calculate the area of a circle, the Chinese devised the Chinese comb method in which a circle is divided into pie slices and rearranged into a rectangle to greatly simplify the math involved.
What other way did Archimedes use to find the area of a circle?
The Greek mathematician Archimedes (c. 287-212 B.C.E.; Hellenic) also found a way to determine the area of a circle similar to the Chinese comb: a method he first recorded in his work, Measurement of a Circle (c. 225 B.C.E.). He also used a sequence of wedges to determine the area of a circle; as the number of wedges (or triangles) inside the circle increased toward infinity, they became infinitely thin. By giving each small triangle a base (b, a line connecting the points where the wedges touched the circle’s circumference), he determined that the area was ½ times the radius (r) times the base, summed over all the infinitesimal triangles (or sum (½) rb). Because they all had the same height, that was factored out. Thus, the area became (½)r (sum (b)) = 1/2rc, with c being the circumference, or the sum of the bases (b) of all the triangles (since the bases make up what is perceived as the circle’s circumference). This is interpreted as one half times the radius times the circumference (c = 2πr), which is the same as saying πr2. (For more about Archimedes and his wedges, see “Mathematical Analysis.”)
How are the surface area and volume of a three-dimensional geometric figure calculated?
The surface area (often abbreviated S.A.) of a three-dimensional geometric figure is the total surfaces of the solid; it actually has units of distance or length squared. For example, the surface area of a cube is 6a2, in which a is the length of the sides. To translate, a cube has sides of equal lengths (a); the area of a cube is the sum of the areas of the six squares (a2) that cover it.
For more “diverse” figures, the surface area is actually equal to the lateral area plus the area of each base. For example, the surface area of a prism or cylinder is the lateral area plus the area of each base. (Because the bases for a prism or cylinder are congruent, this is often expressed as twice the area of the base.) The surface area of a pyramid or cone is the lateral area plus the area of the single base.
The volume of a three-dimensional geometric figure is the total amount of space the object occupies; volumes of such objects have units of length cubed. For example, the volume of a box (also called a rectangular parallelepiped) is length times width times height, or l × w × h; the volume of a cube is all the sides a cubed, or a3.
What are lateral surface areas?
In many mathematical texts, the lateral surface area (L.A.) is given along with—or instead of—the surface area (S.A.). This type of area is the surface area of a three-dimensional figure, excluding the area of any bases. In other words, the lateral surfaces are the side faces (or surfaces) of a solid, or any face or surface that is not a base (or bottom of a figure).
What are the surface area, lateral area, and volume of a sphere?
A sphere is a set of points equidistant from a central point (a center); a sphere in two dimensions is a circle. In the case of a sphere, the lateral and surface areas are the same; therefore, a sphere with a radius r has a surface/lateral area of 4πr2; the volume of a sphere is 4/3πr3.
What are geometric transformations?
Geometric transformations are rules that mean there is a one-to-one correspondence between two sets of points in two figures. A geometric transformation changes the plane or three-dimensional space. Each transformation can be defined by thinking about where each point is “taken,” with a point said to be “taken to its image.”
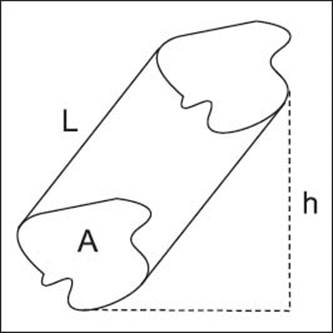
in this irregular prism shape, the lateral area equals the perimeter of shape A multiplied by L, and the surface area equals the lateral area plus two times the area of shape A.
One way to visualize a transformation is to think of expanding, shrinking, or moving one figure to get a second figure. Depending on the transformation, the image will either be congruent (equal) to the original image (called the identity transformation), similar but not necessarily equal, or will not resemble the original at all.
What are some transformations in geometry?
A transformation that keeps a figure’s same shape and size, but moves it to a new location, is called isometry. There are several common types of these transformations. Dilatation is the only transformation that does not create equal figures. It means to take a shape and make it larger or smaller, but keep the same proportions. In terms of a circle, a dilatation creates another circle with the same center, also known as a concentric circle. Reflection is similar to what we called a “flip” in elementary school mathematics—like the flip side of an object. One easy way to see this is by noting one’s reflection in a mirror—the “figure” is on one side of a line and the mirror image on the other. Reflection twice about two parallel lines is synonymous with translation; reflection twice about two intersecting lines is called rotation.
Another type of transformation is rotation. This is simple to understand: in elementary school mathematics it is sometimes called a “turn” or “spin.” In this case, one point on a plane remains unchanged while keeping all the distances between the other points the same. Finally, a translation (or glide transformation) is similar to what is called a “slide” in elementary school mathematics. All the points in the plane move in the same direction and the same distance; or, the figure slides in a single direction. Translation is also considered to be reflection twice across two parallel lines.

René Descartes, who is more often remembered for developing the concept of Cartesian coordinates, also originated the idea of using letters when writing equations that include unknown values. Library of Congress.
ANALYTIC GEOMETRY
What is analytic geometry?
Analytic geometry is actually another name for coordinate (or Cartesian) geometry, a way to geometrically represent ordered pairs of numbers (or coordinates). The objects are described as n-tuples of points, in which n = 2 in a plane and n = 3 in a space (or two and three dimensions) in some coordinate system. Overall, analytic geometry allows mathematicians to determine the position, configurations, and separations of objects using algebraic representation and manipulation of equations.
Who developed analytic geometry?
Analytic geometry began when French philosopher, mathematician, and scientist René Descartes (1596-1650; in Latin, Renatus Cartesius) published a work explaining how to use coordinates for finding points in space. He was the first to make a graph and presented a geometric interpretation of a mathematical function; this marked a step toward what is now known as Cartesian coordinates, a term derived from Descartes’s Latin name. Around the same time—and independently—French mathematician Pierre de Fermat (1601–1665) also did much to establish the ideas of coordinate geometry. But, unlike Descartes, Fermat did not publish his work. Both Descartes’s and Fermat’s ideas would lead to modern Cartesian coordinates. (For more about Descartes and Fermat, see “History of Mathematics.”)
What is a graph?
The term graph has several different meanings in mathematics. It can mean the interpretations of numbers, including bar graphs, pie charts, and line graphs. For example, a pie chart (graph) is often used to represent percents, such as a breakdown of where a taxpayer’s money is spent in the various government agencies for a certain year.
In analytic geometry, a graph is simply a way of plotting—thus, visually representing—points, lines, curves, and solids in order to understand and interpret certain geometric figures and to solve equations. For example, solving an equation with one to two variables (usually written as x and y, or two dimensions) results in a curve on a graph (note: a line is considered a curve in geometry). Equations that contain three variables (usually as x, y, and z, or three dimensions) result in a surface.
What is a coordinate system?
A coordinate system is one that uses coordinates—a number or numbers that identify a point on a number line, plane, or in space. These points are most often seen on a graph and can be a combination of two numbers for a two-dimensional figure or three numbers for three dimensions.
How are two-dimensional Cartesian coordinates determined?
With two-dimensional Cartesian coordinates (or rectangular coordinates), an ordered pair of two numbers is determined using two axes oriented perpendicular to each other (for more about ordered pairs, see “Foundations of Mathematics”). The ordered pair coordinates are found by specifying points along the two axes: First, along the x-axis, the positive or negative amount on either side of the y, or vertical, axis; this is called the abscissa and indicated as x. The other number is the positive or negative amount on either side of the x, or horizontal, axis; this is called the ordinate and indicated as y. The coordinates are usually written in terms of x and y at the point as an ordered pair; for example, in the illustration of a two-dimensional coordinate system below, the ordered pair is (7, 8), in which x is 7 and y is 8.
What is the most well-known coordinate system?
The most well-known coordinate system is the Cartesian coordinate system. Cartesian coordinates (as part of Cartesian geometry) are determined by locating a point using the distances (measured in various units) from perpendicular axes. This system uniquely marks the position of a point on a plane by using two numbers (Cartesian coordinates), or in three-dimensional space by using three numbers—thus giving their distances from two or three mutually perpendicular lines (Cartesian axes).
What are quadrants?
Graphs used in the Cartesian coordinate system are broken down into quadrants, or four segments. For example, in a two-dimensional system, the x and y axis—with the origin as zero and the two axes perpendicular to each other—form the four quadrants. In the top left quadrant (quadrant II), the x is negative and the y is positive; in the top right quadrant (quadrant I), both coordinates are positive; in the bottom left quadrant (quadrant III), Cartesian coordinates are both negative; and in the bottom right quadrant (quadrant IV), the x is positive and the y is negative.
How are three-dimensional Cartesian coordinates determined?
The three-dimensional coordinates are those that describe a solid or three-dimensional object with three axes (or three planes): the usual two axes (as in the two-dimensional system), and an additional line. The coordinates are usually written in terms of x, y, and z, and are often called ordered triples or just triples.
What are some terms used in the Cartesian coordinate system and graphs?
There are numerous terms used in the Cartesian coordinate system. Besides the ones already mentioned, the following are some of the most common.
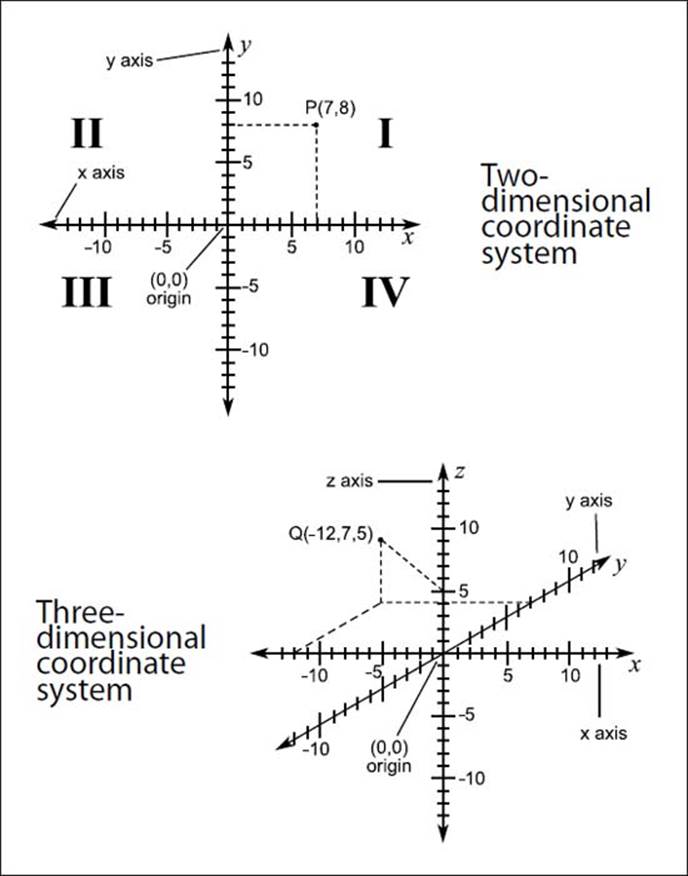
The four quadrants of a two-dimensional coordinate system are indicated above by the Roman numerals I, II, III, and IV. A three-dimensional coordinate system (bottom) adds a z axis so points can be indicated in real space, such as with point Q(-12, 7, 5) in this illustration.
An intercept is a point’s distance on a coordinate system axis from the origin to where a curve or surface intersects the axis. On a graph, the x-intercept and y-intercept are two important features that show where a line cuts through the x and y axes, respectively. The origin is the fixed point from which measurements are taken. In most cases—especially in a standard, simple two-dimensional Cartesian coordinate system—this means the point that represents zero. This is often seen as (0, 0), or the point in which the x and y axes intersect on a graph. In a three-dimensional system, the coordinates are often seen as (0, 0, 0).
A Cartesian plane (or coordinate plane) is described as a two-dimensional space made up of points that are identified by their relation to the origin (zero), and the x and y axes. An axis (the plural is axes) is a reference line used in a graph or a coordinate system, such as the Cartesian system. For example, the x-axis and y-axis are perpendicular lines on a graph in a two-dimensional system; in a three-dimensional system, they are the x-axis, y-axis, and z-axis.
Collinear points are those that lie on a straight line. Any two points are considered collinear because a straight line passes through both. Many procedures in analytic geometry involve determining the collinear points that represent coordinates that solve an equation. Logically, those points that do not lie on the same line—or, in other words, that do not solve the equation—are called non-collinear points.
How is the slope measure and y-intercept of a line determined?
On a graph, the slope is the line in a plane completely specified by a point and a number. Mathematicians know that when an equation is written as y = mx + b, they can determine the slope measure and y-intercept (or slope intercept) of the line. In this case, the m (or x coefficient) is called the slope measure and the y-intercept are the coordinates that solve the equation.
For example, for y = -2x + 4, the slope measure is -2 and y-intercept is the coordinates (0, 4). To test this result, replace the x with the first coordinate (0); -2 × 0 = 0; therefore, 4 is left, resulting in y (or the y-intercept) being 4.
What does point-slope equation of a line refer to in analytic geometry?
A point-slope equation of a line refers to Cartesian coordinates: If a point has coordinates (x1, y1) on a line and a slope equal to m, then the equation y - y1 = m(x - x1) is the point-slope equation. Point-slope is most often used when finding an equation of a line.
Why are functions important to analytic geometry?
The intricacies of functions are important mainly because the function (and the graph of all the points in a function) is one of the basic foundations of analytic geometry.
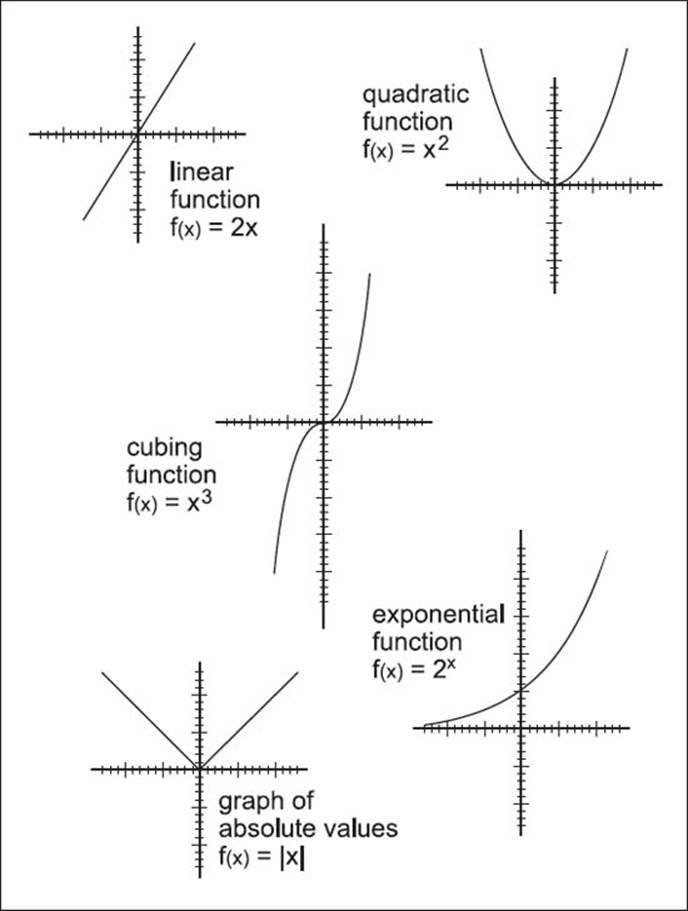
Some common types of graphs illustrate the linear function, quadratic function, exponential function, and absolute values.
How are graphs used to solve equations?
Any figure represented by an equation in two variables is a curve in two dimensions. For example, the equation 3x + 4y = 8 is also called a linear function because the solution represents a line (which is considered a “curve” in geometry) on a graph. There are also graphs of equations in three variables, with the solution as a surface—or the two-dimensional “outer layer” of a three-dimensional object.
This becomes even more evident when trying to solve complex equations or equations with more than one variable.
For example, when determining the solution to an equation, such as 3x + 4y = 8, the two resulting numbers—called a set of ordered pairs of numbers—is called a relation. In turn, a function then becomes a relation in which each first element, such as x, is matched exactly with a second element, such as y. In other words, a function can take on a definite value (or values) when certain values are assigned to other quantities or independent variables of the function. (For more information about functions, see “Foundations of Mathematics” and “Algebra.”)
What is a one-to-one function?
A one-to-one function is one in which each input (number that replaces the variable) has exactly one output (result of the equation). In such cases, the function needs to pass the “horizontal line test,” showing that a horizontal line intersects the graph once and only once. For example, for the equation f(x) = x2, if one restricts the answer to x ≥ 0, the result is a one-to-one function; but the equation with no constraints is not a one-to-one function, as the output value of 4 has the two input values of 2 and -2.
What is the definition of a conic section?
This family of curves—first discovered (as far as we know) by the ancient Greeks—is generated by planes intersecting (“cutting into”) a cone. The resulting feature depends on the angle between the plane and the axis of the cone, with none of the planes passing through the endpoint (vertex) of the cone. Each plane that cuts a cone creates a two dimensional figure called a section, thus the resulting figures are called conic sections or conics. In general, the possible resulting surfaces are a sphere (the cut perpendicular to the axis), ellipse (or the circle as a special case; a cut moderately inclined to the axis), parabola (a cut parallel to one of the straight lines that generate the cone), and hyperbola (using two cones tip to tip, the cut even more steeply inclined than all the others).
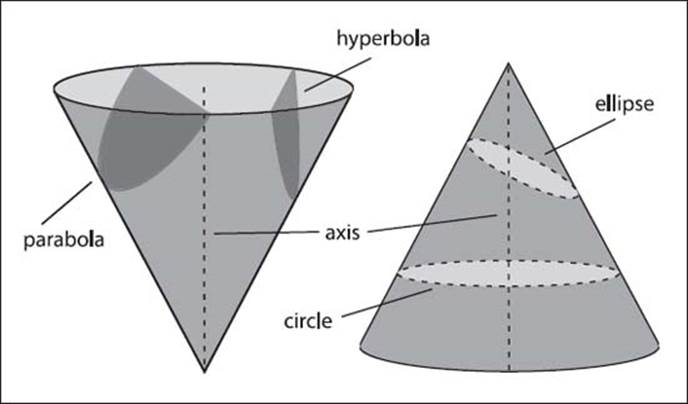
Depending on the way a plane intersects a cone shape, different types of curves will be the result.
What are polar coordinates?
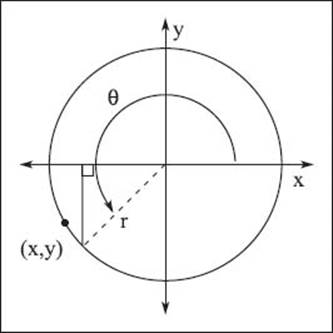
Polar coordinates are actually an alternative system to the Cartesian coordinates. In two dimensions, they mark a point on a plane by its radial distance (r) from an “origin” and a polar angle (θ). This method also uses trigonometric functions such as sin and cos (sine and cosine; for more about such functions, see trigonometry in this chapter).
Polar coordinates in three-dimensional space—also called spherical coordinates—use r and two polar angles (θ, φ) to give the direction from the origin to the point. To compare, a three-dimensional polar coordinate system overlaps the Cartesian system in several ways: For example, θ is the angle between the line to the origin and the z-axis of the Cartesian (x, y, z) system; φ is the angle (counterclockwise when viewed from positive z) between the projection of that line onto the (x, y) plane and the x-axis.
What is an Argand diagram?
An Argand diagram is a graphical way of representing a function of a complex variable, often written as z = x + iy, in which x, y, and z are coordinates in three-dimensional space and i is an imaginary number. Its true discoverer is not actually known, but Swiss mathematician Jean Robert Argand (1768–1822) is given credit for the diagram. It is thought that this was also independently discovered by Danish mathematician Casper Wessel (1745–1818), and later by German mathematician and physicist Karl Friedrich Gauss (1777–1855) in 1832 (but he probably determined it much earlier); thus, its other name is the Gaussian plane.
What is an asymptotic curve?
On a graph, a line that approaches close to a curve (or even an axis) but never quite reaches it is an asymptotic curve. In an example similar to one of Zeno’s paradoxes (see “Foundations of Mathematics”), if a kitten standing a yard from a box walks half the distance to the box each hour, it will technically never reach the box, because the distance it travels each hour is never more than half the remaining distance to the box. If this problem was illustrated as an equation, the answer would never quite reach its solution. A more mathematical example is the exponential function y = 2x, which results in a line that approaches but will never quite reach the x-axis.
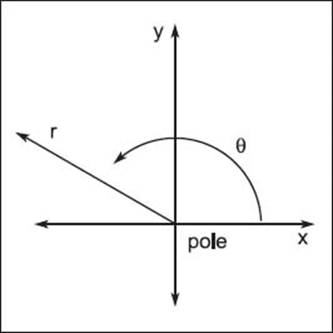
In the above illustration, × = r cos θ; y = r sin θ r2 = x2 + y2; and θ = arctan y/x (x=0).
TRIGONOMETRY
What is trigonometry?
Trigonometry is the study of how the sides and angles of a triangle are related to each other. Interestingly, the angles are usually measured in terms of a circle around the x and y axes; from there, certain formulas are calculated, much as they are in algebra, to determine all the angles and units. Because trigonometry is such a mix of algebra and geometry, it is often considered “the art of doing algebra over a circle.” Although “trig” (as it is nicknamed) is a small part of geometry, it has numerous applications in fields such as astronomy, surveying, maritime and aerial navigation, and engineering.
How are angles measured in trigonometry?
Angles in trigonometry are measured using a “circle” on x and y axes—often called circle trig definitions. The radian measure of an angle is any real number θ (theta; see illustration). Take an instance in which θ is greater than or equal to zero (θ ≥ 0): Picture taking a length of string and positioning one end at zero; then stretch the other end to 1 on the x axis, to point P(1, 0); this is also considered the radius of the circle. Then, in a counterclockwise direction, swing the string to another position, Q (x, y). This results in θ being an angle (associated with the central angle) with a vertex O or (0, 0) and passing through points P and Q; and because the string is “1 units” in length all the way around, the point from Q to the vertex O will also be 1. The resulting angle θ is measured in degrees—and defined as a part of the circle’s total number of degrees (a circle has 360 degrees); it can also be translated into radians.
How are degrees and radians translated?
When measuring the number of degrees in a circle, another unit called radians is often used in trigonometry. It is known that a circle is 360 degrees, with 1 degree equal to 60 minutes (60’) and 1 minute equal to 60 seconds (60’); this is also called DMS (Degree-Minute-Second) notation. One revolution around the circle also measures 2π radians. Thus, 360° = 2π radians; or 180° = π radians. Simply put, to convert radians to degrees, multiply by 180/π; to convert degrees to radians, multiply by π/180. The following are examples of how to convert degrees and radians:
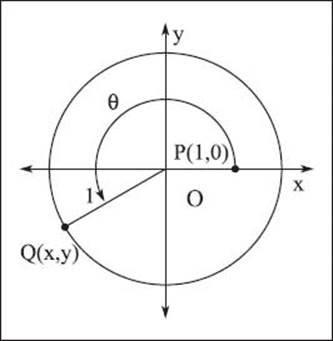
In this example of an angle measured using trigonometry, x2 + y2 = 1.
Convert the angle 236.345° to DMS notation (by breaking down the decimals into minutes and seconds):
236° + 0.345° × 60’ /1°
236° + 20.7’ = 236° + 20’ + 0.7’ × 60’ /1’
= 236° 20’ 42”
Convert the angle 236.345° to radians (convert the entire amount into radians by multiplying π radians by 180°, which is actually equal to “1” since, from above, 180° = π radians):
236.345° × π radians/180° = (236.345 × 3.141592) radians/180°
= 4.124998 radians
And, conversely, convert 4.124998 radians to degrees:
4.124998 radians × 180°/3.141592
= 236.345°
What are the six trigonometric functions?
There are six basic trigonometric functions that can be used to interpret the measurement of angles and triangles—most often defined as circle trig definitions. In terms of the illustration below, the following lists the six trig functions of θ, all defined in terms of the coordinates of Q (x, y):
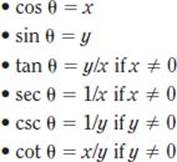
The full names for these functions are cos (cosine); sin (also seen as “sine”); tan (tangent); sec (secant); csc (cosecant); and cot (cotangent).
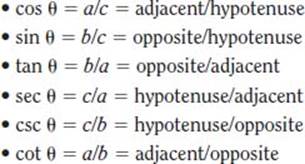
How are trigonometric functions used to describe a right triangle?
The trigonometric functions can be interpreted using the following illustration of a right triangle. If θ is the angle (see illustration), a is one leg (called the adjacent because it is adjacent to the angle), b is another leg (called the opposite, because it is opposite the angle), and c is the hypotenuse:
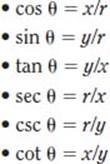
What are the same functions using a circle?
The following shows the same way of looking at the above triangle using a circle (also see illustration):
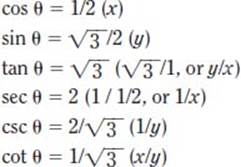
What is an example of finding a trig function?
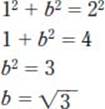
One example of finding a trig function—including an illustration—follows: Find the trig functions of the angle θ = 60°. In this case, make a circle with a string extending two units; then measure 60° from the vertex (O). Drop a line perpendicular from the point on the circle to the initial line, creating a 90° angle; that makes the last angle 30°. Because the result is a right triangle, with the values of the hypotenuse (2) and the adjacent leg (1), the Pythagorean theorem (see elsewhere in this chapter) is used to determine the length of the other leg, or a2 + b2 = c2:
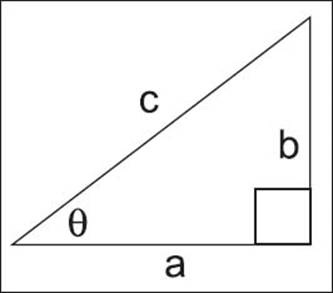
Trigonometric functions can be used to describe a right triangle.
Trigonometric functions of a circle.
Thus, by figuring out the cos (adjacent/hypotenuse) and sin (opposite/hypotenuse) for the angle 60°, Q is at point ![]() on the circle. The other trig functions can be determined using the methods in the questions above:
on the circle. The other trig functions can be determined using the methods in the questions above:
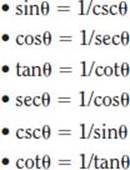
What are some identities in trigonometry?
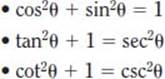
There are many fundamental identities—an equation that is true regardless of what values are substituted for any of the variables—based on trigonometric functions. Because there are relationships between the trig functions, identities can be used to rewrite equations, allowing the user to simplify or get more information out of an equation. The identities include reciprocal identities, ratio identities, periodicity identities, Pythagorean identities, odd-even identities, sum-difference identities, double angle identities, half angle identities, and several more. The following lists a few such identities:
Pythagorean Identities
Reciprocal Identities
Ratio (or Quotient) Identities
![]()
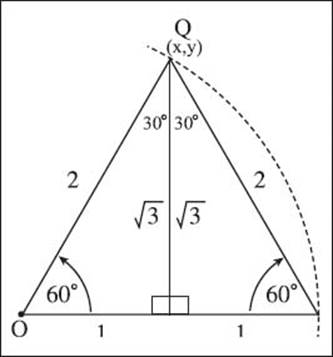
in this example, to find the trig functions of an angle of 60 degrees, draw a triangle with point O at the center of a circle with radius = 2; use the Pythagorean theorem to determine the length of the line dropping down at a right angle from point Q; and then calculate the trig functions using these measurements.
What is a periodic function?
Periodic functions are those that repeat the same values at regular intervals. For trigonometric functions, the period (or the interval of repeated values) is 360 degrees or 2π for the sin, cosine, secant, and cosecant; and 180 degrees or π radians for the cotangent and tangent. (For example, this is often said as “the tangent function has period π.”)
What are the hyperbolic functions (or identities)?
Similar to the other types of functions and identities above, hyperbolic functions (also called hyperbolic identities) are used to make it easier to find solutions to equations. In fact, there are corresponding trigonometric and hyperbolic identities. For example, the most commonly used trig identity, cos2 θ + sin2 θ = 1, has a corresponding hyperbolic identity:
cosh2x — sinh2x = 1
What is one of the most fundamental identities?
If one examines some of the above functions carefully, the sin and cosine functions are actually the coordinates of a point on the unit circle. This implies that the most important fundamental formula in trigonometry is as follows— one that some people call the “magic identity” but is more commonly known as one of the Pythagorean identities:
cos2θ + sin2θ = 1, in which θ is any real number.
This identity can be used in the following step-by-step example:
Show that:
sec2θ = tan2θ + 1
Because secθ = 1/cosθ (from the reciprocal identities), and tanθ = sinθ/cosθ (from the ratio or quotient identities) then:
tan2 + 1 =
(sinθ/cosθ2) + 1 =
(sin2θ/cos2θ) + 1 =
(sin2θ + cos2θ)/cos2θ (where cos2θ divided by itself equals 1).
Then (using the Pythagorean identity):
1/cos2θ= sec2θ (from the reciprocal identity).
In this case, the minus sign is used instead of a plus and the “cos” and “sin” changed to “cosh” and “sinh,” respectively (also changed is the “θ” symbol to x; this is because many trig functions use the angle as the argument, while hyperbolic functions generally do not).
But these equations are not exactly the same. In particular, when one has a product of two sines it is replaced by minus a product of the two sinh’s. For example, for the trig term sin2, the hyperbolic identity uses -sinh2 (this is called Osborn’s rule). This is not always straightforward because the minus sign is often hidden.
OTHER GEOMETRIES
What is projective geometry?
Projective geometry is a branch of geometry that deals with the properties of geometric objects under projection; it was formerly called “higher” or “descriptive” geometry. Projection includes the transformation of points and lines in one plane onto another plane. This is done by connecting the corresponding points on the planes using parallel lines—similar to shining a light on a person’s profile and producing a silhouette on a nearby wall. Each point on the wall is a “projection” of the person’s head.
What is non-Euclidean geometry?
Non-Euclidean geometry is a branch of geometry that deals with Euclid’s fifth postulate—the “parallel postulate” that only one line is parallel to a given line through a given external point. This postulate is replaced by one of two alternative postulates. The results of these two alternative types of non-Euclidean geometry are similar to those in Euclidean geometry, except for those propositions involving explicit or implicit parallel lines. (For more information about non-Euclidean geometry, see “History of Mathematics.”)
What are hyperbolic and elliptical geometry?
Hyperbolic and elliptical geometry are the non-Euclidean alternative geometries mentioned above. The first alternative is to allow two parallels through any particular external point—or hyperbolic geometry. This studies two rays extending out in either direction from a point P, and not meeting a line L; thus, the rays are considered to be parallel to L. This also helps prove the theorem that the sum of the angles of a triangle is less than 180 degrees. It is called hyperbolic because a line in the hyperbolic plane has two points at infinity; this is similar to drawing a hyperbola that has two asymptotes.
The second alternative, called elliptical geometry, has no parallels to a given line L through an external point P. In addition, the sum of a triangle’s angles is greater than 180 degrees. Sometimes called Riemann’s geometry (who developed the idea even further; see below), it is called elliptic in general because a line in the plane of this geometry has no point at infinity (where parallels may intersect it), which is similar to an ellipse that has no asymptotes. (For more information about hyperbolas, ellipses, and asymptotes, see elsewhere in this chapter).
Who developed the two alternatives to Euclidean geometry?
Hyperbolic geometry was first announced by Russian mathematician Nikolai Ivanovich Lobachevski (1792-1856; also seen as Lobatchevsky) in 1826. He challenged Euclid’s fifth postulate that one and only one line parallel to a given line can be drawn through a fixed point external to the line. Instead, he developed a self-consistent system of geometry in which the “flawed” postulate was replaced by one allowing more than one parallel through the fixed point.
This idea was already developed independently by Hungarian János (or Johann) Bolyai (1802–1860) in 1823 (after several attempts to prove the Euclidean parallel postulate, he developed his system by assuming that a geometry could be constructed without the parallel postulate) and German mathematician, physicist, and astronomer Karl Friedrich Gauss (1777-1855; also seen as Johann Carl [or Karl] Friedrich Gauss) in 1816. But, as often happens in science and mathematics, the person who publishes an idea first gets most of the credit; this time, Lobachevski was the first to publish.
Who further developed the ideas in non-Euclidean geometry?
In 1854, German mathematician Georg Friedrich Bernhard Riemann (1826–1866) presented several new general geometric principles, laying the foundations of a non-Euclidean system of geometry called elliptical or Riemann geometry. In this, he represented elliptic space and generalized the work of German mathematician Karl Friedrich Gauss in differential geometry. Riemann’s studies would eventually provide the basic tools for the general theory of relativity’s mathematical expression. For example, the type of non-Euclidian geometry suggested by Riemann enabled Albert Einstein (1897–1955) to work on his general relativity theory (1916), showing that the true geometry of space may be non-Euclidian. (For more about Riemann, see “Math Basics.”)
What is topology?
In general, topology is a branch of mathematics that examines patterns of geometric figures based on position and relative position without regard to size. It has also been called “rubber-sheet” geometry because objects examined in topology are under continuous transformation (also called topological transformation or homeomorphism). The shapes can be stretched, bent, and twisted in various ways, as long as they are not torn or cut as they are changed. For example, a circle is considered to be topologically equivalent to an ellipse (it can be deformed by stretching) and a sphere is equivalent to an ellipsoid. This includes changing an object based on a one-to-one correspondence. (For more about changing such shapes and one-to-one correspondence, see elsewhere in this chapter.)
What is a good example of a topological structure?
A good example of a topological structure is called the Möbius strip (also called the twisted cylinder). It was invented by German mathematician and astronomer August Ferdinand Möbius (1790–1868) in September 1858, although he did not publish his findings until 1865. The strip was also developed independently by German mathematician Johann Benedict Listing (1808-1882), who discovered it in July 1858. Although Listing published his findings in 1861, Möbius’s name is used for the strip.
This one-sided surface is easy to visualize: Take a long single strip of paper, give one of the two ends a twist (that gives the strip a half twist in its length, or a 180 degrees twist), then attach the two ends. Amazingly, you can verify that it has only one side—it is not possible to paint it with two colors. Even if you cut the strip in half (down the middle), you will still have a one sided-surface. In fact, ants would be able to walk on the Möbius strip’s single surface indefinitely, since there is no true edge in the direction of their movement.
A Möbius strip is a one-sided topological structure.