SAT Math 1 & 2 Subject Tests
Chapter 7
Coordinate Geometry
About 12 percent of the questions on each Math Subject Test will concern graphs on the coordinate plane. Most coordinate geometry questions on the Math Level 1 Subject Test are about lines, slopes, and distances. On the Math Level 2 Subject Test, you”re more likely to see hyperbolas, ellipses, and more complicated curves. Simple circles and parabolas can appear on either test. The techniques in this chapter will prepare you for all major coordinate geometry question types.
DEFINITIONS
Here are some geometry terms that appear on the Math Subject Tests. Make sure you”re familiar with them. If the meaning of any of these vocabulary words keeps slipping your mind, add that word to your flash cards.
|
Coordinate Plane |
A system of two perpendicular axes used to describe the position of a point using a pair of coordinates—also called the rectangular coordinate system, or the Cartesian plane. |
|
Slope |
For a straight line, the ratio of vertical change to horizontal change. |
|
x-axis |
The horizontal axis of the coordinate plane. |
|
y-axis |
The vertical axis of the coordinate plane. |
|
Origin |
The intersection of the x- and y-axes, with coordinates (0, 0). |
|
x-intercept |
The x-coordinate of the point at which a line or other function intersects the x-axis. These values are also known as zeros, roots, or solutions. At the x-intercept, y = 0. |
|
y-intercept |
The y-coordinate of the point at which a line or other function intersects the y-axis. At the y-intercept, x = 0. |
THE COORDINATE PLANE
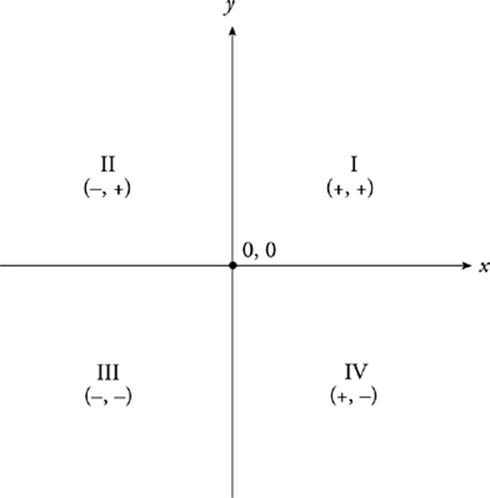
The plane is divided into four regions by two perpendicular axes called the x- and y-axes. These axes are like rulers that measure horizontal distances (the x-axis) and vertical distances (the y-axis). Okay, now follow along with the picture. Each axis has a positive direction and a negative direction; up and right are positive, down and left are negative. The four regions created by the axes are known as quadrants. The quadrants are numbered from I to IV, starting on the upper right and moving counterclockwise.
The Coordinate Plane
The coordinate plane is a
perfectly flat surface that
extends an infinite distance
in two dimensions.
Oh, and it doesn”t exist.
It”s just an abstract idea, a
way of seeing mathematical
relationships visually.
The location of every point on the coordinate plane can be expressed by a pair of coordinates that show the point”s position with relation to the axes. The x-coordinate is always given first, followed by the y-coordinate: (2, 3), for example. This is called a coordinate pair—it is read as “tworight, three up.” These coordinates reflect the distance on each axis from the origin, or intersection of the axes.
DRILL
On the coordinate plane below, match each coordinate pair to the corresponding point on the graph and identify the quadrant in which the point is located. The answers to these drills can be found in Chapter 12.
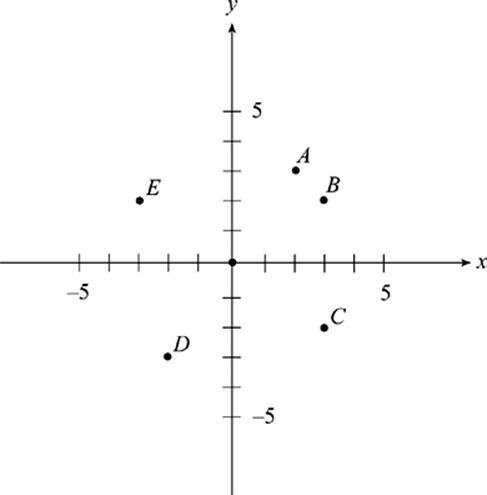
1. (−3, 2) Point_______, quadrant_______
2. (2, 3) Point_______, quadrant_______
3. (3, −2) Point_______, quadrant_______
4. (−2, −3) Point_______, quadrant_______
5. (3, 2) Point_______, quadrant_______
THE EQUATION OF A LINE
Most of the coordinate geometry questions on the Math Level 1 Subject Test will deal with the equations and graphs of lines. Lines will also be tested on the Math Level 2 Subject Test, but will generally be outnumbered on the Math Level 2 Subject Test by more complicated functions.
The equation of a line can show up on the test in two forms. The more common form is called the slope-intercept formula, and it is shown here:
Slope-Intercept Form of the Equation of a Line
y = mx + b
You may have seen this before. In this form, m and b are constants; m is the slope and b is the y-intercept. An equation in this form might look like: y = ![]() x − 4. So m =
x − 4. So m = ![]() and b = −4.
and b = −4.
Let”s talk a little about the y-intercept. This is the y-coordinate of the point at which the line intersects the y-axis. So, the slope-intercept formula of a line gives you the slope of the line and a specific point on the line, the y-intercept. The line y = ![]() x −4 therefore has a slope of
x −4 therefore has a slope of ![]() and contains the point (0, −4).
and contains the point (0, −4).
If you see an equation of a line in any other form, just convert what ETS gives you into slope-intercept form by solving for y. Here”s how you”d convert the equation y + 2 = 3(x − 1) to the slope-intercept form.
y + 2 = 3(x − 1)
y + 2 = 3x − 3
y = 3x − 5
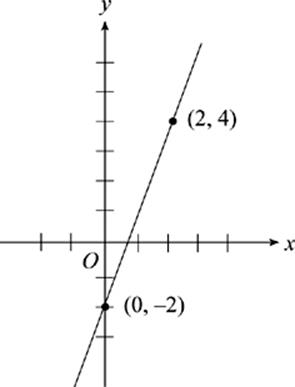
The line therefore contains the point (0, −5) and has a slope of 3.
Notice that the x-coordinate of the y-intercept is always 0. That”s because at any point on the y-axis, the x-coordinate will be 0. So, whenever you”re given the equation of a line in any form, you can find the y-intercept by making x = 0 and then solving for the value of y. In the same way, you can find the x-intercept by making y = 0 and solving for the value of x. The x- and y-intercepts are often the easiest points on a line to find. If you need to identify the graph of a linear equation, and the slope of the line isn”t enough to narrow your choices down to one, finding the x- and y-intercepts will help.
To graph a line, simply plug a couple of x-values into the equation of the line, and plot the coordinates that result. The y-intercept is generally the easiest point to plot. Often, the y-intercept and the slope are enough to graph a line accurately enough or to identify the graph of a line.
DRILL
Try the following practice questions. The answers to these drills can be found in Chapter 12.
7. If a line of slope 0.6 contains the point (3, 1), then it must also contain which of the following points?
(A) (−2, −2)
(B) (−1, −4)
(C) (0, 0)
(D) (2, −1)
(E) (3, 4)
10. The line y − 1 = 5(x − 1) contains the point (0, n). What is the value of n ?
(A) 0
(B) −1
(C) −2
(D) −3
(E) −4
11. What is the slope of the line whose equation is
2y − 13 = −6x − 5 ?
(A) −5
(B) −3
(C) −2
(D) 0
(E) 3
19. If the line y = mx + b is graphed above, then which of the following statements is true?
(A) m < b
(B) m = b
(C) 2m = 3b
(D) 2m + 3b = 0
(E) m = ![]()
Let”s Talk About Slope
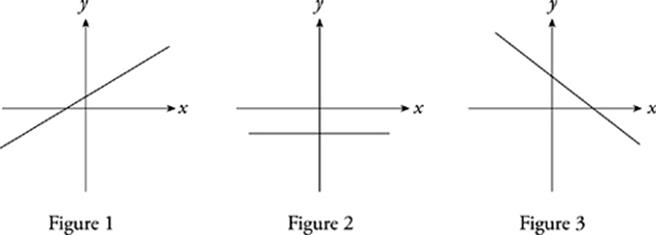
Often, slope is all you need to match the equation of a line to its graph. To begin with, it”s easy to distinguish positive slopes from negative slopes. A line with a positive slope is shown in Figure 1 above; it goes uphill from left to right. A line with zero slope is shown in Figure 2; it”s horizontal, and neither rises nor falls. A line with a negative slope is shown in Figure 3; it goes downhill from left to right.
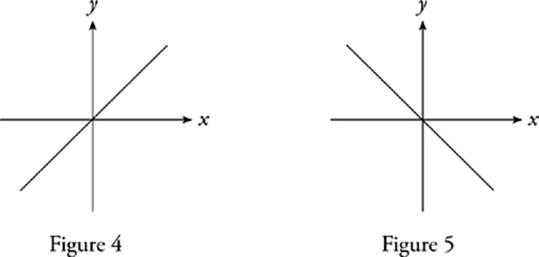
A line with a slope of 1 rises at a 45° angle, as shown in Figure 4. A line with a slope of −1 falls at a 45° angle, as shown in Figure 5.
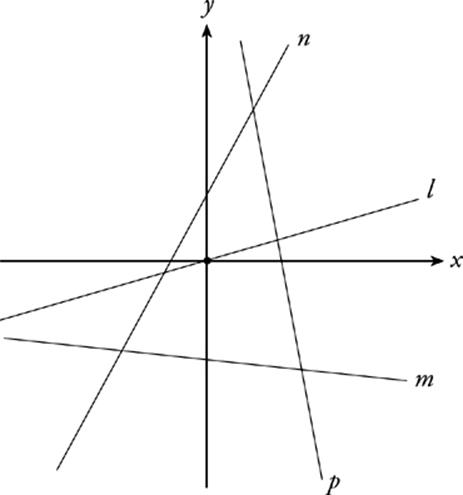
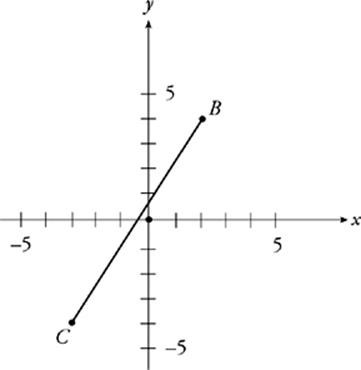
Because a line with a slope of 1 or −1 forms a 45° angle with either axis, you can figure out even more about a line”s slope by comparing that line”s slope to a 45° angle. Lines that are closer to horizontal have fractional slopes. Lines that are closer to vertical have slopes greater than 1 or less than −1. On the graph above, for example, line l has a positive fractional slope. Line m has a negative fractional slope. Line n has a positive slope greater than 1. Line p has a negative slope less than −1. Estimating slope can be a valuable time-saver.
You Have Two Points, You Have It All!
Using the slope formula, you can figure out the slope of any line given only two points on that line—which means that you can figure out the complete equation of the line. Just find the line”s slope and plug the slope and one point”s coordinates into the point-slope equation of a line.
Remember that the equation of a line gives you the slope without requiring calculation. But what if you”re only given the coordinates of a couple of points on a line? Since the slope of a line is rise (change in y) over run (change in x), the coordinates of two points on a line provide you with enough information to figure out a line”s slope. All you need is the following formula:
Slope Formula
m = 
Slopes can also help you determine the relationship between lines in a coordinate plane.
· The slopes of parallel lines are identical.
· The slopes of perpendicular lines are opposite reciprocals.
Flip It!
Opposite reciprocal means
flip the number over and
reverse the sign.
That means that if line l has a slope of 2, then any line parallel to l will also have a slope of 2. Any line perpendicular to l will have a slope of −![]() .
.
DRILL
The answers to these drills can be found in Chapter 12.
4. What is the slope of the line that passes through the origin and the point (−3, 2) ?
(A) −1.50
(B) −0.75
(C) −0.67
(D) 1.00
(E) 1.50
17. Lines l and m are perpendicular lines that intersect at the origin. If line l passes through the point (2, −1), then line m must pass through which of the following points?
(A) (0, 2)
(B) (1, 3)
(C) (2, 1)
(D) (3, 6)
(E) (4, 0)
23. Which of the following could be the graph of 2(y + 1) = −6(x − 2) ?
(A) 
(B) 
(C) 
(D) 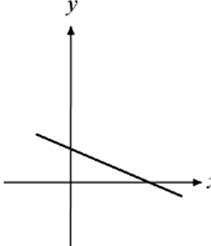
(E) 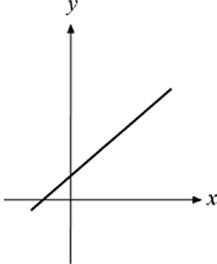
47. Line f and line g are perpendicular lines with slopes of x and y, respectively. If xy ≠ 0, which of the following are possible values of x − y ?
I. 0.8
II. 2.0
III. 5.2
(A) I only
(B) I and II only
(C) I and III only
(D) II and III only
(E) I, II, and III
Line Segments
A line by definition goes on forever—it has infinite length. Coordinate geometry questions may also ask about line segments, however. Any coordinate geometry question asking for the distance between two points is a line segment question. Any question that draws or describes a rectangle, triangle, or other polygon in the coordinate plane may also involve line segment formulas. The most commonly requested line segment formula gives the length of a line segment.
Let”s look at a line segment:
If you want to find the length of BC, turn it into a triangle:
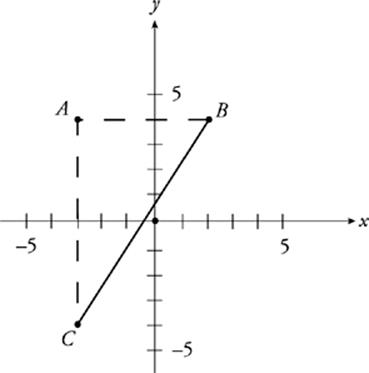
We”ve added in point A to illustrate the point. You know how to find the hypotenuse of a triangle, right? Pythagorean theorem! It”s easy to find the distance from A to B, just count across. The distance is 5. The distance between A and C is 8. Using the Pythagorean theorem, we can fill in 52+ 82 = 89. So the length of BC is ![]() . If you ever forget the distance formula, remember: All you have to do is make a triangle. After all, that”s how the distance formula was created in the first place!
. If you ever forget the distance formula, remember: All you have to do is make a triangle. After all, that”s how the distance formula was created in the first place!
The Distance Formula
For the two points (x1, y1) and (x2, y2),
d = ![]()
How Did We Get There?
Look carefully at the
distance formula. Notice
anything familiar? If you
square both sides, it”s just
the Pythagorean theorem!
Now let”s take a look at the same triangle we were working with and use the distance formula.
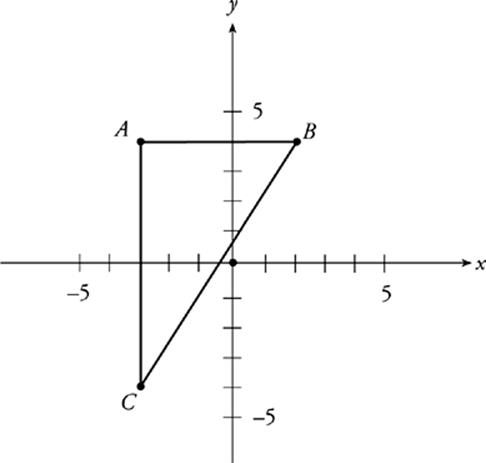
The coordinates of B are (2, 4). The coordinates of C are (−3, −4). If you plug these coordinates into the distance formula, you get
d = ![]()
d = ![]()
d = ![]()
d = ![]()
d = 9.434
Notice that you would get the same answer by counting the vertical distance between B and C (8) and the horizontal distance between B and C (5), and using the Pythagorean theorem to find the diagonal distance.
The other important line segment formula is used to find the coordinates of the middle point of a line segment with endpoints (x1, y1) and (x2, y2).
Coordinates of the Midpoint of a Line Segment
For the two points (x1, y1) and (x2, y2),
M = 
Another Way to
Think About It
The midpoint formula
finds the average of
the x-coordinates and
the average of the
y-coordinates.
The midpoint and distance formulas used together can answer any line segment question.
DRILL
The answers to these drills can be found in Chapter 12.
12. What is the distance between the origin and the point (−5, 9) ?
(A) 5.9
(B) 6.7
(C) 8.1
(D) 10.3
(E) 11.4
19. Point A has coordinates (−4, 3), and the midpoint of AB is the point (1, −1). What are the coordinates of B ?
(A) (−3, 4)
(B) (−4, 5)
(C) (4, −5)
(D) (5, −4)
(E) (6, −5)
27. Which of the following points is farthest from the point (2, 2) ?
(A) (8, 8)
(B) (−6, 2)
(C) (4, −6)
(D) (−5, −3)
(E) (9, 4)
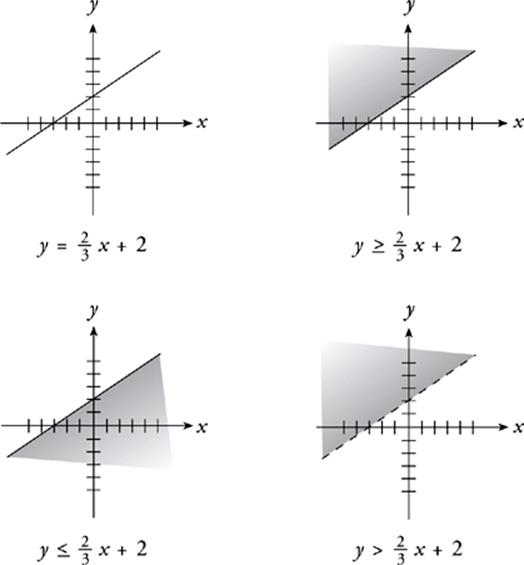
LINEAR INEQUALITIES
A linear inequality looks just like a linear equation, except that an inequality sign replaces the equal sign. They are graphed just as lines are graphed, except that the “greater than” or “less than” is represented by shading above or below the line. If the inequality is a “greater than or equal to” or “less than or equal to,” then the line itself is included and is drawn as a solid line. If the inequality is a “greater than” or “less than,” then the line itself is not included; the line is drawn as a dotted line, and only the shaded region is included in the inequality. Take a look at some examples.
GENERAL EQUATIONS
While lines are the focus of most coordinate geometry questions, you may also be required to work with the graphs of other shapes in the coordinate plane. In the next few pages, you”ll find the general forms of the equations of a number of shapes, and listings of the special information each equation contains.
When ETS asks a coordinate geometry question about nonlinear shapes, the questions are generally very simple. It will be very useful to you to remember the basic equations in this chapter and the shapes of their graphs. Questions on this material generally test your understanding of the information contained in the standard forms of these equations.
The Parabola
A parabola takes the form of a single curve opening either upward or downward, becoming increasingly steep as you move away from the center of the curve. Parabolas are the graphs of quadratic functions, which were discussed in Chapter 4. The equation of a parabola can come in two forms. Here is the one that will make you happiest on SAT Math.
Standard Form of the Equation of a Parabola
y = a(x − h)2 + k
In this formula, a, h, and k are constants. The following information can be gotten from the equation of a parabola in standard form:
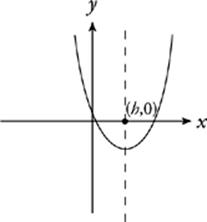
The axis of symmetry of the parabola is the line x = h.
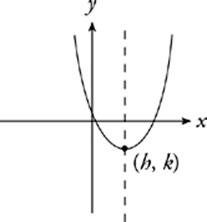
The vertex of the parabola is the point (h, k).
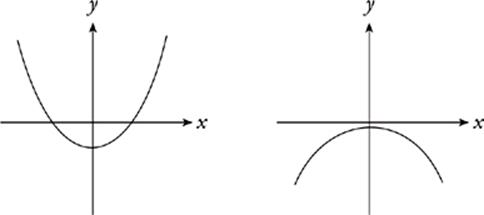
If a is positive, the parabola opens upward. If a is negative, the parabola opens downward.
General Form of the Equation of a Parabola
y = ax2 + bx + c
Déjà Vu?
This equation may look
familiar. It turns out that
quadratic equations are
equations of parabolas.
It”s all connected.
In this formula, a, b, and c are constants. The following information can be gotten from the equation of a parabola in general form:
• The axis of symmetry of the parabola is the line × = −![]() .
.
• The x-coordinate of the parabola”s vertex is −![]() . The y-coordinate of the vertex is whatever you get when you plug −
. The y-coordinate of the vertex is whatever you get when you plug −![]() into the equation as x.
into the equation as x.
• The y-intercept of the parabola is the point (0, c).
• If a is positive, the parabola opens upward. If a is negative, the parabola opens downward.
Since a parabola is simply the graph of a quadratic equation, the quadratic formula can be used to find the roots (x-intercepts or zeros), if any, of the parabola. The discriminant, or b2 − 4ac, can be used to determine how many distinct real roots the quadratic has, which is the number of x-intercepts the parabola has. For example, if the discriminant is 0, you know that the parabola has one root, which means that the graph is tangent to the x-axis at the vertex of the parabola. If the discriminant is positive, the graph intercepts the x-axis at two points. If the discriminant is negative, the parabola does not cross the x-axis.
DRILL
The answers to these drills can be found in Chapter 12.
34. What is the minimum value of f(x) if f(x) = x2 − 6x + 8 ?
(A) −3
(B) −2
(C) −1
(D) 0
(E) 2
37. What are the coordinates of the vertex of the parabola defined by the equation y = ![]() x2 + x +
x2 + x + ![]() ?
?
(A) (−2, 4)
(B) (−1, 2)
(C) (1, 2)
(D) (2, 4)
(E) (2, −4)
38. At which of the following x-values does the parabola defined by y = (x − 3)2 − 4 cross the x-axis?
(A) −3
(B) 3
(C) 4
(D) 5
(E) 9
The Circle
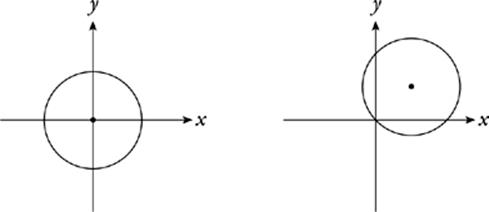
The circle is that round shape you know and love. It”s also probably ETS”s favorite nonlinear shape in the coordinate plane, particularly on the Math Level 1 Subject Test. Below is the formula for a circle.
Standard Form of the Equation of a Circle
(x − h)2 + (y − k)2 = r2
In this formula, h, k, and r are constants. The following information can be learned from the equation of a circle in standard form:
• The center of the circle is the point (h, k).
• The length of the circle”s radius is r.
And that”s all there is to know about a circle. Once you know its radius and the position of its center, you can sketch the circle yourself or identify its graph easily. It”s also a simple matter to estimate the radius and center coordinates of a circle whose graph is given, and make a good guess at the equation of that circle. One last note: If the circle”s center is the origin, then (h, k) = (0, 0). This greatly simplifies the equation of the circle.
Equation of a Circle with Center at Origin
x2 + y2 = r2
DRILL
The answers to these drills can be found in Chapter 12.
30. Which of the following points does NOT lie on the circle whose equation is (x − 2)2 + (y − 4)2 = 9 ?
(A) (−1, 4)
(B) (−1, −1)
(C) (2, 1)
(D) (2, 7)
(E) (5, 4)
34. Points S and T lie on the circle with equation x2 + y2 = 16. If S and T have identical y-coordinates but distinct x-coordinates, then which of the following is the distance between S and T ?
(A) 4.0
(B) 5.6
(C) 8.0
(D) 11.3
(E) It cannot be determined from the information given.
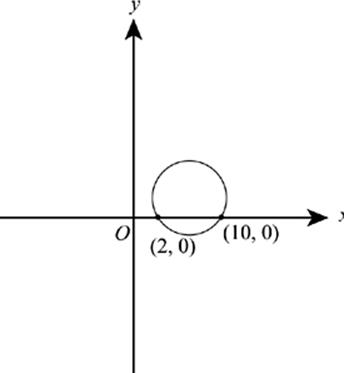
50. Which of the following equations could represent the circle shown in the figure above?
(A) x2 + y2 − 14x − 8y + 40 = 0
(B) x2 + y2 − 14x + 8y + 40 = 0
(C) x2 + y2 − 12x − 6y + 20 = 0
(D) x2 + y2 − 10x + 8y + 16 = 0
(E) x2 + y2 + 4x − 6y − 12 = 0
The Ellipse

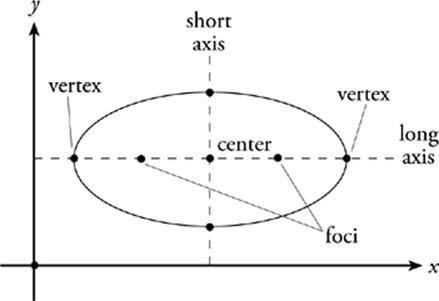
The equation of an ellipse looks similar to the equation of a circle, but an ellipse is actually a much more complex shape. You don”t need to worry about the ellipse if you”re taking the Math Level 1 Subject Test; it appears exclusively on the Math Level 2 Subject Test.
An ellipse has a center like a circle, but since it”s squashed a little flatter than a circle; it has no constant radius. Instead, an ellipse has two vertices (the plural of vertex) at the ends of its long axis, and two foci (the plural of focus), points within the ellipse. The foci of an ellipse are important to the definition of an ellipse. The distances from the two foci to a point on the ellipse always add up to the same number for every point on the ellipse. This is the formula for an ellipse:
General Equation of an Ellipse
 = 1
= 1
In this formula, a, b, h, and k are constants. The following information can be learned from the equation of an ellipse in standard form:
The center of an ellipse is the point (h, k).
The width of the ellipse is 2a, and the height is 2b.
An ellipse can be longer either horizontally or vertically. If the constant under the (x − h)2 term is larger than the constant under the (y − k)2 term, then the major axis of the ellipse is horizontal. If the constant under the (y − k)2 term is bigger, then the major axis is vertical. Like that of a circle, the equation for an ellipse becomes simpler when it”s centered at the origin, and (h, k) = (0, 0).
Equation of an Ellipse with Center at Origin
 = 1
= 1
The few ellipses that show up on the Math Level 2 Subject Test are usually in this simplified form; they are centered at the origin.
DRILL
The answers to these drills can be found in Chapter 12.
15. How long is the major axis of the ellipse with a formula of  = 1 ?
= 1 ?
(A) 1
(B) 4
(C) 5
(D) 8
(E) 10
40. Which of the following points is the center of the ellipse whose formula is  = 1 ?
= 1 ?
(A) 
(B) 
(C) (−5, 3)
(D) (25, −9)
(E) (9, 16)
The Hyperbola
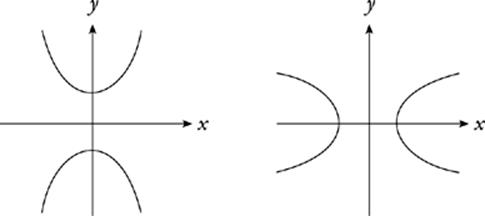
A hyperbola is basically an oval turned inside out. Like the ellipse, the hyperbola only shows up on the Math Level 2 Subject Test, and it doesn”t show up frequently. The equation of a hyperbola differs from the equation of an ellipse only by a sign.
Why Don”t We See
Hyperbolas as Much?
Notice that we don”t give
you as much information
about the hyperbola as
we do about the parabola.
You don”t need it. These
questions rarely come up,
and when they do, they”re
pretty straightforward.
You just need to know the
form of the equation and
the center point of the
hyperbola.
General Equation of a Hyperbola
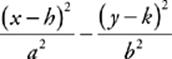 = 1
= 1
In this formula, a, b, h, and k are constants. The following information can be learned from the equation of a hyperbola in standard form:
The hyperbola”s center is the point (h, k).
Like an ellipse, a hyperbola can be oriented either horizontally or vertically. If the y-term is negative, like in the equations above, then the curves open out to the right and left. If the x-term is negative—that is, the x, h, and a switch places with the y, k, and b—then the curves open up and down. Like that of an ellipse, a hyperbola”s equation becomes simpler when it is centered at the origin, and (h, k) = (0, 0).
Equation of a Hyperbola with Center at Origin
 = 1
= 1
The few hyperbolas that show up on the Math Level 2 Subject Test are usually in this simplified form; they are centered at the origin.
DRILL
Try this hyperbola question. The answer can be found in Chapter 12.
38. The hyperbola  = 1 has its center at which of the following points?
= 1 has its center at which of the following points?
(A) (−9, −4)
(B) (−4, −5)
(C) (4, 5)
(D) (9, −4)
(E) (16, 25)
TRIAXIAL COORDINATES: THINKING 3-D
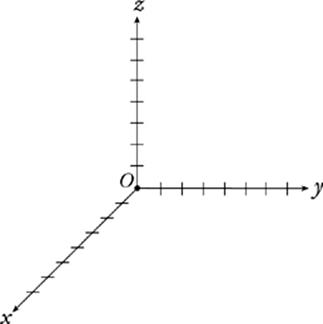
On the Math Level 2 (or the difficult third of the Math Level 1), you may run into a twist on the coordinate plane—a coordinate space. A third dimension can be added to the coordinate plane by introducing a third axis (often referred to as the z-axis) that passes through the origin at right angles to both the x-axis and the y-axis. While the x- and y-axes define the location of a point in a plane, the x-, y-, and z-axes define the location of a point in a three-dimensional space.
Such a system of three axes is called a three-dimensional coordinate system, a triaxial coordinate system, or a coordinate space. Sometimes it”s not called anything at all; ETS will simply show you a diagram of a three-dimensional graph, or a set of triple coordinates, and expect you to understand what you”re seeing. The coordinates of a point in three dimensions are given in this form: (x, y, z). The point (3, 4, 5) is located 3 units along the x-axis, 4 units along the y-axis, and 5 units along the z-axis. Always check the labels on the axes if you”re given a diagram, because there”s no firm convention about which axis is pictured in which position.
If you are given two points in 3-D, (x1, y1, z1) and (x2, y2, z2), then the distance, d, between them is given by the following formula:
Distance in a Three-Dimensional Space
d = ![]()
Most of the three-dimensional coordinate questions on the Math Subject Tests require you to calculate a distance between two points in a 3-D coordinate system. Just use the formula.
Connect the Dots
This formula is equivalent
to the Super Pythagorean
theorem: a2 + b2 + c2 = d2.
DRILL
Try the following practice questions. The answers to these drills can be found in Chapter 12.
29. What is the distance between the origin and the point (5, 6, 7) ?
(A) 4.24
(B) 7.25
(C) 10.49
(D) 14.49
(E) 18.00
34. Sphere O has a radius of 6, and its center is at the origin. Which of the following points is NOT inside the sphere?
(A) (−3, 5, 1)
(B) (−4, −4, 3)
(C) (5, −2, 2)
(D) (4, 1, −4)
(E) (2, −4, −3)
Summary
· The coordinate plane is created by the perpendicular intersection of the x- and y-axis. This intersection creates four quadrants.
· The slope-intercept form of the equation of a line is y = mx + b. The slope of the line is m and the y-intercept is b.
· To find the slope of a line, take two points on the line and put them in the formula m =  .
.
· The distance formula comes from the Pythagorean theorem. It is d = ![]() .
.
· To find the coordinates of the midpoint of a line, take the average of the endpoints. The formula is M = 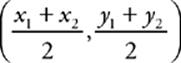 .
.
· The general form of the equation of a parabola is y = a (x − h)2 + k, where (h, k) is the vertex of the parabola. The general form of a parabola is a quadratic equation: y = ax2 + bx + c. Use the general form to find the axis of symmetry, the vertex, and whether the parabola opens up or down.
· The general form of the equation of a circle is (x − h)2 + (y − k)2 = r2, where (h, k) is the center of the circle.
· The general form of the equation of an ellipse is 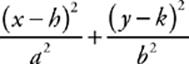 = 1, where (h, k) is the center of the ellipse.
= 1, where (h, k) is the center of the ellipse.
· The general form of the equation of a hyperbola is 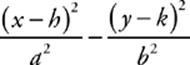 = 1, where (h, k) is the center of the hyperbola.
= 1, where (h, k) is the center of the hyperbola.
· The 3-D coordinate plane has 3 axes, x, y, and z. The formula for the distance of a line in three-dimensional space is d = ![]()