Two-Dimensional Calculus (2011)
Answers to Selected Exercises
Chapter one
Section 1![]()
1.1 a. ![]() 2, 1
2, 1![]()
c. ![]() 1, −1
1, −1![]()
e. ![]() 2, 1
2, 1![]()
1.2 a. |v| = 3, α = 0
c. |v| = 2, α = ![]() π
π
e. |v| = ![]() , α =
, α = ![]() π
π
1.3 a. ![]() −5/
−5/![]() , 5/
, 5/![]()
![]()
c. ![]() −
−![]() , −1
, −1![]()
e. ![]() 3, 4
3, 4![]()
1.4 a. ![]() 0, 0
0, 0![]()
c. 0
1.5 ![]()
c. −10
1.6 a. ![]() π
π
c. ![]() π
π
1.7 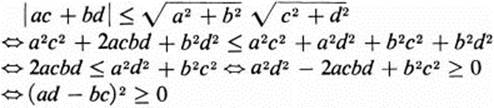
1.12 a. |v| = |w|, |v| = |u|, or |u| = |w|
c. u · v = 0, u · w = 0, or v · w = 0
1.13 b. w + ![]() u =
u = ![]() (v + w)
(v + w)
1.14 a. v − u, v − w
c. u + ![]() (v − u) −
(v − u) − ![]() u =
u = ![]() v
v
e. ![]() v
v
1.15 a. u = v − w ⇔ v = u + w ⇔ w = v − u
c. ![]() v =
v = ![]() (u + w) ⇔ u = v − u
(u + w) ⇔ u = v − u
1.16 ax + by = c, ax0 + by0 = c ⇒ a(x − x0) + b(y − y0) = 0.
![]() a, b
a, b![]() ⊥
⊥ ![]() x − x0, y − y0
x − x0, y − y0![]() .
.
1.19 Speed is 50 miles per hour; angle with direction of train is cos−1 ![]() ~ 37°.
~ 37°.
1.21 130 miles per hour
1.23 The wind is from the Northwest.
1.24 The star always appears to be displaced in the direction of the earth’s motion.
1.25 Magnitude 2![]() , in direction of positive y axis.
, in direction of positive y axis.
1.27 a. Equal magnitude and opposite direction.
1.28 a. Equilibrium point is on line joining the two bodies, at distance d/(1 + ![]() ) from body of mass m1.
) from body of mass m1.
1.30 a. All lines perpendicular to v.
Section 2
2.1 a. x = 3t + 1, y = 2t + 1, 0 ≤ t ≤ 1
c. x = − 3t + 2, y = 3, 0 ≤ t ≤ 1
e. x = −t, y = t, 0 ≤ t ≤ ![]()
2.2 a. y = 2x − 5, 2 ≤ x ≤ 3
c. y = x2, 0 ≤ x ≤ 1
e. ![]()
2.3 y = 2x2 − 1, −1 ≤ x ≤ 1
2.5 x2/a2 − y2/b2 = 1
2.7 r ≠ 0
2.9 a. ![]() 1, 2
1, 2![]()
c. ![]() 2t, 4t3
2t, 4t3![]()
e. [2/(1 + t2)2] ![]() −2t, 1 − t2
−2t, 1 − t2
2.10 a. ![]() 1, 2
1, 2![]() /
/![]()
c. ![]() 1, 2t2
1, 2t2![]() /(1 + 4t4)1/2
/(1 + 4t4)1/2
e. ![]() −2t, 1 − t2
−2t, 1 − t2![]() /(1 + t2)
/(1 + t2)
2.11 a. 20
c. 61/27
e. 8
2.12 a. x3 − 3xy + y3 = 0
2.15 a. Yes
b. all t ≠ 0
c. y = |x|
2.16 a. ![]() 0, 0
0, 0![]() ; −r
; −r ![]() cos t, sin t
cos t, sin t![]() = −
= − ![]() x − c, y − d
x − c, y − d![]() ;
; ![]() 0, −g
0, −g![]()
Section 3
3.7 c. Ex. 3.1b, c; Ex. 3.4a, b; Ex. 3.5a
3.8 a. ![]()
c. circles x2 + y2 = R2
3.9 a. Moved upwards 2 units
c. Moved 2 units in the positive y direction
e. Reflected in the plane x = 0
g. Contracted by a factor of 2 in the x direction
i. Reflected in the origin
3.10 a. They are the same curves, but correspond to different values of the function.
Chapter two
Section 4
4.1 a. fx = 4x3 + 6xy − 5y3, fy = 3x2 − 15xy2
c. fx = 3x2 + 6xy + 3y2, fy = 3x2 + 6xy2 + 3y2
e. fx = cos (x + y), fy = cos (x + y)
g. ![]()
i. fx = − y/(x2 + y2), fy = x/(x2 + y2)
k. fx = y(y2 − x2)/(x2 + y2)2, fy = x(x2 − y2)/(x2 + y2)2
m. ![]()
4.2 a. 1
c. 2e
4.3 a. 3(x3 + y3)
c. ![]()
4.4 a. fx = ex cos y = gy, fy = −ex sin y = −gx
4.9 a. 4(x2 + y2)
b. e2x
c. 0
d. 0
4.12 a. fx(0, 0) = 1, fy(0, 0) = 0
c. fx(0, 0) = 1, fy(0, 0) = 0
4.13 a. x2 + y2 ≤ 1, y ≤ x
c. x > 0, y > 0, x + y < 1
4.14 a. The ellipse x2 + 4y2 = 4
c. The ellipses x2 + 4y2 = 4 and x2 + 4y2 = 16
e. The horizontal line segments y = ±2, |x| ≤ 1 and the vertical line segments x = ±1, |y| ≤ 2
4.15 a. Ex. 4.14 a, b
b. For example, in Ex. 4.14c (2, 0) and in Ex. 4.14e (1, 0)
4.17 Ex. 4.14 c, d,f
4.18 a. Ex. 4.14 a, d, e
Section 5
5.1 a. z = 3x − 4y + 5
c. z = 2
e. 25z = 6x + 12y − 20
5.3 a. z = z0 − (z0/x0)1/2(x − x0) − (z0/y0)1/2(y − y0)
5.8 a. fx(x0, y0) = 2x0 sin 1/x0 − cos 1/x0, fy(x0, y0) = 2y0
b. fx(0, y0) = 0, fy(0, y0) = 2y0
5.10 a. fx = 2y(y2 − x2)/(x2 + y2)2, fy = 2x(x2 − y2)/(x2 + y2)2
Section 6
6.1 a. ![]() 3, −7
3, −7![]()
c. ![]() 3, −7
3, −7![]()
6.2 a. 1
c. −1
6.3 a. ![]() 2, 0
2, 0![]() ; 2,
; 2, ![]() , 0, −
, 0, −![]() , −2, −
, −2, −![]() , 0,
, 0, ![]()
c. ![]() 1, 1
1, 1![]() ; 1,
; 1, ![]() , 1, 0, −1, −
, 1, 0, −1, −![]() , −1, 0
, −1, 0
6.4 a. 1; α = ![]() π
π
c. 1; Tα = ![]()
![]() ,
, ![]()
![]()
6.5 ∇f(x0, y0) = 2F'(![]() +
+ ![]() )
) ![]() x0, y0
x0, y0![]()
6.9 ![]() −
−![]() , 2
, 2![]()
![]()
6.12 a. (![]() , 1); maximum
, 1); maximum
c. (0,0); minimum
6.14 a. (−2, 1)
c. All points on the line 2x − 3y + 1 = 0
6.17 a = ![]() , b =
, b = ![]() ; r1 = −
; r1 = −![]() , r2 =
, r2 = ![]() , r3 = −
, r3 = −![]()
Section 7
7.1 a. 4 cos 2t
c. 4
e. 50t3
7.2 a. 0
c. 0
e. 0
7.3 xx(1 + log x)
7.5 ![]() ; increasing
; increasing
7.8 a. Degree 7
c. Not homogeneous
e. Degree 3
g. Degree −![]()
7.10 a. Homogeneous if k = l; then, of degree k
c. Degree k − l
e. Degree 2k
7.16 a. 21.3
c. 0.975
7.17 21.30 < f(2.1, 3.2) < 21.43
7.18 a. (Sin πx)/x
c. (3x − 2x)/x
e. (2e−2 − e−x)/x
7.19 a. π
7.21 a. ![]()
7.25 a. dr/dt = (xdx/dt + y dy/dt)/r
Section 8
8.1 a. ![]()
c. ![]()
e. −1
8.2 a. ![]()
c. ![]()
8.4 a. ![]()
c. ![]()
8.5 a. −b4/a2y3
c. (ey − 1)(ey + ex)/(1 − ex)2
8.8 In Ex. 6.5, level curves are circles about the origin.
8.9 Level curves are:
a. x2 + (y − 1)2 = 1
c. x2 + y2 = 2
8.11 a. ∇f = 2![]() x, −y
x, −y![]() , ∇g =
, ∇g = ![]() y, x
y, x![]() ; ∇f ⊥ ∇g
; ∇f ⊥ ∇g
8.12 a. fxgx + fygy = 0
8.14 a. fy = 0; cannot solve in the form y = g(x)
c. fy = 0; can solve as y = g(x), but g(x) not differentiable at x = 0
8.16 a. Cusp at the origin
c. Curve consists of the origin and the circle of radius 1 about the origin
e. “Level curve” has no points on it
8.18 a. If f(t, φ) = φ − kt − ![]() sin φ, then fφ = 1 − φ cos φ > 0 since
sin φ, then fφ = 1 − φ cos φ > 0 since ![]() < 1
< 1
c. (x, y) = (a, 0) ⇔ cos φ = 1; (x, y) = (−a, 0) ⇔ cos φ = −1
d. ![]()
Section 9
9.1 a. ![]() , −
, −![]()
c. 4
e. 1
9.2 (0, −2)
9.4 2 radians
9.6 a. (3, 4)
c. Point on the line 3x + 4y = 25 nearest the origin
9.8 a. Pairs of straight lines parallel to the given one
9.10 a. Pairs of lines, x + y = ±c
c. 4; when x + y = 0
e. No
9.11 a. f(x, y) = π: the segment L; f(x, y) = 0: the y axis except for L; f(x, y) = c, 0 < c < π: a pair of circular arcs through the endpoints of L
b. (![]() , 0)
, 0)
9.12 a. 1
c. (0, 0)
Section 10
10.1 a. 3, 1
c. 3, −1
e. −1, −5
g. ![]() , −
, −![]()
i. (![]() − 1)/2, (−
− 1)/2, (−![]() − 1)/2
− 1)/2
k. (5 + 3![]() )/2, (5 − 3
)/2, (5 − 3![]() )/2
)/2
10.3 a. max (1/![]() , 1/
, 1/![]() ), (−1/
), (−1/![]() , −1/
, −1/![]() );
);
min (1/![]() , −1/
, −1/![]() ), (−1/
), (−1/![]() , 1/
, 1/![]() )
)
c. max (1/![]() , −1/
, −1/![]() ), (−1/
), (−1/![]() , 1/
, 1/![]() );
);
min (1/![]() , 1/
, 1/![]() ), (−1/
), (−1/![]() , −1/
, −1/![]() )
)
10.5 a. III
c. I
e. V
10.6 ![]()
10.8 a. a2 − (λ1 + λ2)a + λ1λ2 + b2 = 0
10.10 a. λ2 = 0 and λ1 + λ2 = a + c ⇒ λ1 = a + c
10.11 a. λ2 = a + c
c. ![]()
10.14 A = a cos2 θ + 2b cos θ sin θ + c sin2 θ
B = (c − a) cos θ sin θ + b(cos2 θ − sin2 θ
C = a sin2 θ − 2b sin θ cos θ + c cos2 θ
10.18 a. 3X2 − Y2
c. ![]() X2 +
X2 + ![]() Y2
Y2
e. ![]() X2 −
X2 − ![]() Y2
Y2
10.19 a. Ellipse; ![]() π
π
c. Hyperbola
e. Parallel straight lines
10.20 a. Ellipse if k > 0; point if k = 0; no locus if k < 0
c. Pair of parallel straight lines if k > 0; single line if k = 0; no locus if k < 0
e. Hyperbola if k > 0 or k < 0; pair of intersecting lines if k = 0
10.22 1, ![]()
10.23 a. They are reciprocals.
10.27 2 − ![]()
10.29 a. ![]()
Section 11
11.1 a. fxx = 30x4 − 60x2y2, fxy = −40x3y + 15y4, fyy = −10x4 + 60xy3
c. ![]()
e. fxx = −fxy = fyy = 20(x − y)3
11.2 a. fxx = −fyy = 0
c. fxx = −fyy = 2(x3 − 3xy2)/(x2 + y2)3
11.8 a. fxx = 2g'(x2 + y2) +4x2g″(x2 + y2), fxy = 4xyg″″(x2 + y2),
fyy = 2g'(x2 + y2) + 4y2g″(x2 + y2)
11.11 a. fxxx = ex sin y, fxxy = ex cos y, fxyy = −ex sin y, fyyy = −ex cos y
c. −ex sin y
11.12 a. fxxxx = y4exy, fxxyy = (2 + 4xy + x2y2)exy, fxyyy = (3x2 + x3y)exy
c. (kyk−1 + xyk)exy
e. 0, if k ≠ ![]() ; k! if k =
; k! if k = ![]()
11.13 a. 2(3 cos2 α − 8 cos α sin α + 2 sin2 α)
c. α = ![]() π
π
11.15 a. 11/2
11.16 12, 2
11.17 x″fx + y″fy + x′2fxx + 2x′y′ fxy + y′2fyy
11.19 a. rxx = y2/r3, rxy = −xy/r3, ryy = x2/y3
c. Positive semidefinite
11.20 c. Upper hemisphere; all curves are concave downward
11.21 b. ![]()
11.22 ![]()
11.26 a. i(i − 1) ... (i − k + 1)cxi−kyj, if k ≤ i; 0 if k > i
c. k!![]() ! if k = i,
! if k = i, ![]() = j; 0 otherwise
= j; 0 otherwise
Section 12
12.1 a. (0, −1): saddle point; (0,3): local minimum
c. (0, 3), (−4, −3): saddle points; (0, −3): local minimum; (−4, 3): local maximum
12.2 a. See Ex. 6.15
c. If AC − B2 > 0, a local maximum if A < 0 and a local minimum if A < 0; if AC − B2 < 0, a saddle point
e. A straight line
12.3 a. (0, 0): local minimum
c. (0, 0): neither
e. All points on the lines y = x and y = −x: local minimum
12.6 a, c. Local minimum
e. Neither
12.7 a. ![]()
c. ![]()
12.8 a. f(x, y) = −11 + 6(x − 1) + 3(y + 2) + 2(x − 1)2 −(x − 1)(y + 2)
c. f(x, y) = −6 + 3(x − 1) + 5y + 3(x − 1)2 + 3(x − 1)y
c. ![]()
e. f(x, y) = 0 + R(x, y)
12.9 a. 
c. 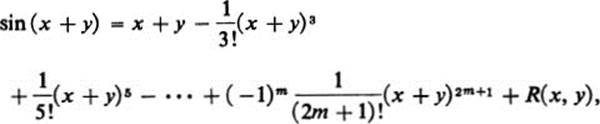
where 2m + 1 is the largest odd integer which does not exceed n
e. ![]()
12.10 a. z = 51 − 6x − 8y; crosses
12.16 Cube
12.18 10 × 10 × 20 inches
12.20 The absolute maxima and absolute minima are respectively:
a. ![]() ; −
; −![]()
c. (3 + ![]() )/2; 0
)/2; 0
e. 9; 0
g. 4; −3
i. 1; −1
k. 2; 4/e3
12.21 b. ![]()
Chapter three
Section 13
13.1 a. Uniform stretching by a factor of 3
c. Reflection in the origin (or rotation through 180°)
e. Horizontal stretching by factor of 2 and vertical stretching by factor of 3, followed by reflection in the horizontal axis
g. “Shearing” motion
t. Double folding over
k. Distortion in vertical direction
m. Map of plane onto square
13.2 a. R = 2r, φ = θ
c. R = r, φ = −θ
e. R = r![]() , φ = θ +
, φ = θ + ![]() π
π
g. R = r, φ = ![]() π − θ
π − θ
13.4 a. x = ![]() u, y =
u, y = ![]() ν
ν
c. x = u − 1, y = u + ν − 1
e. x = ![]() (2u + ν)1/3, y = −
(2u + ν)1/3, y = − ![]() (2u − v)1/5
(2u − v)1/5
13.5 a. Bijective
c. Surjective
e. Injective
g. None
i. None
13.6 a. The line y = x
c. The x and y axes
13.7 a. x = 0
c. y = (![]() − 1)x and y = −(
− 1)x and y = −(![]() + 1)x
+ 1)x
13.8 a. x2 + y2 = R2/2
c. x2/4R2 + y2/9R2 = 1
e. (x + 2)2 + (y − 3)2 = R2
g. x2 + y2 = R
13.9 a. The x and y axes
c. A rectangular hyperbola whose asymptotes are the x and y axes, lying in the first and third quadrants if d > 0 and in the second and fourth quadrants if d < 0.
e. They start with the lines y = ±x and move outward through a family of hyperbolas.
13.10 a. R = ex, φ = y
c. It moves counterclockwise around the circle u2 + v2 = e2c
e. The positive v axis
g. The positive u axis
i. The image ray rotates about the origin in the counterclockwise direction
13.11 a. (1, 1)
c. The line y = 1, for example
13.13 a. S is upper half-plane: v ≥ 0
c. S is fourth quadrant: u > 0, v < 0; F−1: x = log u, y = log(−v)
e. S is square −π/2 < u < π/2, − π/2 < v π/2; F−1: x = tan u, y = tan v
g. S is right half of parabola: v = u2, u ≥ 0
13.14 a. x = u − u2 − v2 + 2uv, y = v − u
Section 14
14.1 a. Δ = 1
c. Δ = −a2 ≠ 0
e. Δ = 0
g. Δ = 1
i. Δ = 0
k. Δ = 0
14.2 a. Δ = −4; x = ![]() v, y =
v, y = ![]() u; Δ′ = −
u; Δ′ = −![]()
c. ![]()
14.3 a. v = − u
c. v = −3u
14.4 a. F−1(e, 2e) is the line x + y = e
14.6 a. φ = −θ
c. φ = θ + π
e. φ = θ − ![]() π
π
14.8 a. c. x2 + y2 ≤ R2; Δ = 1
e. x2 + y2 ≤ R2/2; Δ = 2
14.9 c. (0, 0), (a, c), (b, d)
14.10 a. 2
14.11 b. A = a2 + c2, B = ab + cd, C = b2 + d2
c. AC − B2 = (ad − bc)2
14.14 a. (—1, 0)
14.17 Δ = ±1
14.18 b. Δ = ad − bc ≠ 0
14.22 a. F(![]() x, y
x, y![]() ) = F(x
) = F(x![]() 1, 0
1, 0![]() + y
+ y![]() 0, 1
0, 1![]() ) = xF(
) = xF(![]() 1, 0
1, 0![]() ) + yF(
) + yF(![]() 0, 1
0, 1![]() )
)
14.24 b. The equation in part a satisfied by any characteristic value is quadratic and can have at most two roots.
d. If ad − bc < 0, the equation satisfied by λ has positive discriminant. If a ray in the x, y plane rotates in the counterclockwise direction, and the image ray in the clockwise direction, then at some point they will have the same direction.
14.25 a. C is the image of the unit circle under a nonsingular linear transformation.
Section 15
15.1 a. 
c. 
e. 
g. 
15.4 The product of the determinants can be zero only if one of the determinants is zero.
15.7 a. u = (x − y)/![]() , v = (x + y)/
, v = (x + y)/![]()
c. u = −y, v = −x
15.8 a. y = x
15.9 The line y = (tan ![]() π)x:
π)x:
15.10 a. −![]() π
π
c. Reflection in the line y = −x
15.15 a. A dilation of ![]() and rotation through −
and rotation through −![]() π
π
c. A dilation of 5 and rotation through α = arc tan ( −![]() ), 0 < α < π
), 0 < α < π
15.17 a. Horizontal stretching by a factor of λι
c. Projection of entire plane onto the y axis along lines parallel to the x axis, followed by reflection in the x axis.
15.26 Use the fact that the determinant of a product of matrices is the product of the determinants.
Section 16
16.1 a. 
c. 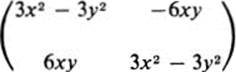
e. 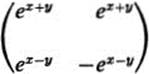
g. 
i. 
k. 
16.2 a. 1; nowhere
c. 9(x2 + y2)2; (x, y) = (0, 0)
e. −2e2x; nowhere
g. −2x2ex2+xy; x = 0
i. sin2 x cos2 y − cos2 x sin2 y = sin (x + y) sin(x − y); x + y = 2πn or x − y = 2πn, n an integer
k. 0; everywhere
16.5 If Fk is given by u = fk(x, y), v = gk(x, y), then f1 and f2 have the same gradient, and hence differ by a constant. The same is true for g1 and g2.
16.6 a. dF is the linear transformation with matrix  .
.
16.7 a. 
16.9 F maps (1, ![]() ) onto (—8, 0);
) onto (—8, 0); ![]() is a dilation by factor of 12 composed with rotation through
is a dilation by factor of 12 composed with rotation through ![]() π.
π.
16.11 The image is a horizontal ray to the right of (0, 1).
16.12 a. 
c. Orientation-preserving if f′(x0) and g′(y0) have the same sign; orientation−reversing if opposite signs.
e. |f′(x0)| and |g′(y0)| represent horizontal and vertical stretching at (x0, y0).
16.14 a. 1/e
c. ![]()
16.16 C regular means that the tangent vector is never zero. F regular means that dF maps nonzero vectors into nonzero vectors, hence vectors tangent to Γ are never zero.
Section 17
17.1 a. zx(1, 0) = 2, zy(1, 0) = 0
c. zx(0, 0) = e, zy(0, 0) = 0
17.2 a. 2cfu
17.6 a. 
17.7 a. 1
c. e2
e. 4e(1 + π)
17.11 a. F(0, 0) = (1, 1); xu = ![]() , xv =
, xv = ![]() , yu =
, yu = ![]() , yv = −
, yv = −![]()
c. F(0, 0) = (0, 0); xu = 1, xv = 0, yu = 0, yv = 1
e. F(0, 0) = (1, 0); xu = 1, xv = 0, yu = 0, yv = 1
g. F(0, 0) = (0, 0); = 1, xu = 1, yu = 0, yv = 1
17.12 a. x = ![]() (log u + log v), y =
(log u + log v), y = ![]() (log u − log v); u > 0, v > 0
(log u − log v); u > 0, v > 0
c. x = u − v3, y = v; the whole plane
e. x = ![]() log (u2 + v2), y = arc tan v/u; u > 0, for example
log (u2 + v2), y = arc tan v/u; u > 0, for example
17.14 a. A differentiable function f(x) has a differentiable inverse in some neighborhood of x0 if and only if f'(x0) ≠ 0.
Section 18
18.1 a. Dependent; (u − 1)(v − 1) = 1
c. ![]()
e. ![]()
g. Dependent; u = 2v
i. ![]()
18.3 a. If f(x, y) ≡ 0, then Eq. (18.2) holds with λ = 1, μ = 0.
c. Suppose f(x, y), g(x, y) are linearly dependent. If f(x, y) ![]() 0, choose c = 0, and f(x, y) ≡ cg(x, y); if g(x, y) ≡ 0, then g(x, y) = 0 · f(x, y); if neither f nor g is ≡ 0, use part b. Conversely, if f(x, y) ≡ cg(x, y) use λ = 1, μ = −cin Eq. (18.2).
0, choose c = 0, and f(x, y) ≡ cg(x, y); if g(x, y) ≡ 0, then g(x, y) = 0 · f(x, y); if neither f nor g is ≡ 0, use part b. Conversely, if f(x, y) ≡ cg(x, y) use λ = 1, μ = −cin Eq. (18.2).
18.6 b. The image lies on the curve u = F(t), v = G(t).
18.7 a. ![]() π
π
c. cos−1(2/![]() ) or tan−1
) or tan−1 ![]() .
.
18.8 a. Diffeomorphism; conformai.
c. Diffeomorphism; not conformal
e. Not a diffeomorphism since (x0, y0) and (x0, y0 + 2π) map into same point
g. Not a diffeomorphism since ∂(u, v)/∂(x, y) = 0 at (![]() ,
, ![]() )
)
i. A conformai diffeomorphism
Section 19
19.1 a. 0; solenoidal
c. φ'(x) + ψ'(y); solenoidal ⇔ φ(x) = ax ψ(y) = −ay, a constant
e. 2y; not solenoidal
g. 4xy + 6x2; not solenoidal
i. 2 cos x cos y; not solenoidal
k. 2ex cos y; not solenoidal
19.2 a. Conservative; ax + by
c. ![]()
e. Conservative; x2y
g. Not conservative
i. Conservative; −cos x cos y
k. Not conservative
19.3 a, f, l; also part b if a + b = 0; part c if of the form ![]() ax, −ay
ax, −ay![]() ; and part d if of the form
; and part d if of the form ![]() ay, ax
ay, ax![]()
19.9 a. ![]() 1, 0
1, 0![]()
c. 2![]() x, y
x, y![]()
e. (1/x2)![]() −y, x
−y, x![]()
Section 20
20.1 a. (a2 + b2)uXX + 2(ac + bd)uXY + (c2 + d2)uYY
c. (X2 + Y2)(uXX + uYY)
20.6 a. 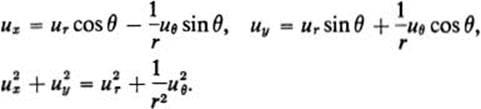
c. uθ = −rvr, vθ = rur
20.9 u = Aθ + B, A and B constants, θ = arc tan (y/x).
20.12 ![]()
20.14 a. A = a cos2 α + 2b cos α sin α + c sin2 α
B = −a cos α sin α + b(cos2 α − sin2 α) + c cos α sin α
C = a sin2 α − 2b cos α sin α + c cos2 α
20.15 u(x, y) = G(3x − y) + H(3y − x)
20.16 c. u(x, y) = g(y) + xh(y)
20.18 UY = Uy cos2 α + (vy − ux) cos α sin α − vx sin2 α
VX = −uy sin2 α + (vy − ux) cos α sin α + vx cos2 α
20.19 a. (ux − vy) cos 2a + (uy + vx) sin 2α
c. uy − vx
Chapter four
Section 21
21.1 a. −![]()
c. ![]()
21.3 ![]()
21.4 a. ![]()
c. 1 − ![]() π
π
e. 0
21.5 1
c. 1
e. −1
21.6 a. ![]() π
π
c. −![]() π
π
21.7 a. 0
c. 2πab
e. −πab
g. 0
21.9 −2πab
21.13 a. ![]() /2
/2
c. ![]() π
π
e. ![]() ab(a2 + ab + b2)/(a + b)
ab(a2 + ab + b2)/(a + b)
21.14 ds/dτ = (ds/dt)|dt/dτ|
21.16 a. 3π
c. ![]()
e. 1
21.17 a. ![]()
c. 13π/3
e. 2πa + π sinh 2a
g. 4πa2
21.18 a. ![]()
c. π![]()
21.19 a. ![]()
c. ![]()
21.20 a. ![]()
c. ![]()
21.21 c. (2πa)(2πb)
21.22 a. π
c. 1
21.23 a. ![]()
c. ![]()
Section 22
22.1 a. 0
c. 1
e. 2e+1 − 1
22.4 a. ![]()
c. 11
22.5 a. ![]()
c. −11
22.6 c. 2ab
22.8 a. x2y3 + x3y2
c. ![]()
22.9 a. 4
c. log ![]() − 1
− 1
22.11 a. py = 3 ≠ qx = 6; f = 3xy2 − y3
22.13 a. v = x + y
c. v = cos x cosh y
e. v = ex sin y
22.15 a. −1
c. −14
24.7 a. πt
24.9 b. 2π2a2b
d. π
24.10 c. ![]()
24.12 a. ![]() a2
a2
c. (c5 − a5 − b5)/15, where c2 = a2 + b2
e. (0, 3πa/16)
g. ![]()
24.17 a. h = x3y2/6
c. h = (x2 + y2)5/2/15
24.19 ![]() (e − 1)
(e − 1)
24.22 a. 0 ≤ y ≤ 2 − 2x, 0 ≤ x ≤ 1
c. ![]()
e. ey ≤ x ≤ 1 + (e − 1)y, 0 ≤ y ≤ 1
24.23 a. ![]()
c. 2
Section 25
25.1 a. (c − d)(b − a)
c. 0
25.3 ![]()
25.4 a. 12
c. 0
25.5 a. ![]()
c. ![]()
25.6 a. 2π
25.7 a. 2π; the integral over each side is the angle subtended by that side at (X, Y).
25.9 a. ![]()
c. y log x + log y − 1/x
25.15 a. ![]() ab
ab
c. 0
25.17 a. 2πk
Section 26
26.1 a. 0
c. πab
26.2 a. x = 2 cos t, y = 3 sin t, 0 ≤ t ≤ 2π
c. C1 : x = 3 cos t, y = 3 sin t, 0 ≤ t ≤ 2π
C2 : x = 1 + cos t, y = −sin t, 0 ≤ t ≤ 2π
e. ![]()
26.3 a. 0
c. 5π
e. 4
26.4 a. πab
c. a2(2 − ![]() π)
π)
e. ![]() πa2
πa2
26.7 a. ![]()
c. ![]()
Section 27
27.1 a. ![]()
c. 2/π
e. a2/12
g. ab/4
27.2 a. ![]()
Section 23
23.1 a. h(t) = 1 − t, 0 ≤ t ≤ 1
c. h(t) = t − t2, 0 ≤ t ≤ 1
e. ![]()
g. h(t) = 2 sinh t, 0 ≤ t ≤ 2
i. h(t) = 2(1 − |t|), −1 ≤ t ≤ 1
k. ![]()
m. 
o. 
23.2 a. ![]()
c. ![]()
e. ![]()
g. 2(cosh 2 − 1)
i. 2
k. 5
m. 5π
o. 12 − π
23.3 a. h(t) = 1 − t, 0 ≤ t ≤ 1
c. ![]()
e. ![]()
g. ![]()
i. h(t) = 2 − t, 0 ≤ t ≤ 2
k. ![]()
m. Same answer as Ex. 23.1m
o. ![]()
23.5 a. ![]()
c. ![]()
23.6 c. ![]()
23.8 ![]()
23.9 ![]() πa2
πa2
23.10 a. Not bounded
c. Not bounded and does not consist of a domain together with its boundary
e. Does not consist of a domain together with boundary (a domain is connected)
23.14 a. ![]()
Section 24
24.1 a. 98
c. ![]()
24.2 a. ![]()
24.3 a. 0
24.4 a. ![]()
24.5 a. ![]()
c. abc/6
24.6 b. ![]() πbc
πbc
27.3 a. (e − 1)/2
27.6 Possible choices are:
a. (![]() ,
, ![]() )
)
c. (1, 2/π)
e. (a/4, a/3)
g. (a/2, b/2)
27.8 4 + 1/4k2
27.10 a. ![]()
27.11 a. ![]()
27.20 a. ![]()
c. ![]()
e. ![]()
Section 28
28.1 a. ![]()
c. ![]()
e. ![]()
28.2 a. ![]() π
π
c. ![]()
e. ![]()
28.3 a. ( − 4/3π, 0)
28.4 a. ![]()
28.5 a. ![]()
c. ![]()
28.7 a. ![]()
28.8 a. 
c. 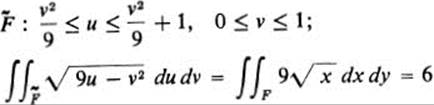
28.9 (e − 1)2
28.11 a. u = 2x + y, v = x + 3y
28.12 π(1 − e−R2)/6
28.13 c. ![]()
28.16 a. π
c. ![]() π
π
e. ![]()