Two-Dimensional Calculus (2011)
Chapter 1. Background
1. Vectors in the plane
Our purpose in the present section is to recall the elementary properties of vectors in two dimensions, and to establish the notation that we shall use in the sequel.1
Although other aspects of vectors may be more important in other contexts, the basic property of vectors in connection with the calculus is that they may be characterized by a magnitude and a direction. Examples of vector quantities arise in the most diverse parts of mathematics and physics, as we shall see shortly, but the archetype of a vector is the representation of a “displacement.” The classic example of “5 miles to the Northeast” describes a vector whose magnitude is 5, and whose direction is Northeast. It provides a clear illustration of the fact that a vector is not, in general, associated with any fixed point. The vector “5 miles Northeast” represents the notion of starting at an arbitrary point and moving a distance of 5 miles in the Northeast direction from there (Fig. 1.1).
In general, a displacement is a motion through a given distance in a given direction. Any pair of points p, q in the plane can be used to define a displacement—the one described by moving from p to q. Of course, many pairs of points may be used to describe the same displacement (Fig. 1.2).
For computation with vectors, it is often convenient to describe them in terms of their components. For displacement vectors, this description is particularly simple. We may describe the position of a point q relative to another point p as being “3 miles West and 4 miles South.” This information is clearly equivalent to giving the distance and direction from p to q, and it may be used to describe the same displacement from any other point p' to the corresponding point q'.
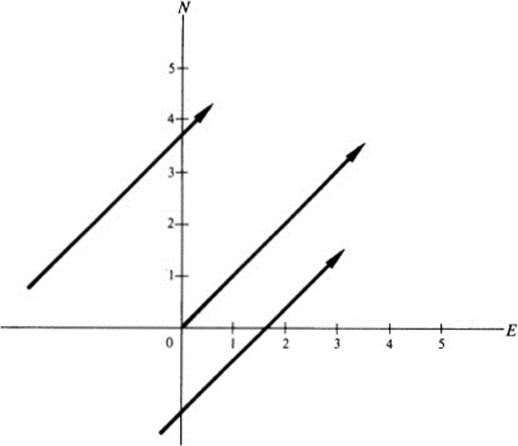
FIGURE 1.1 The vector “5 miles to the Northeast”
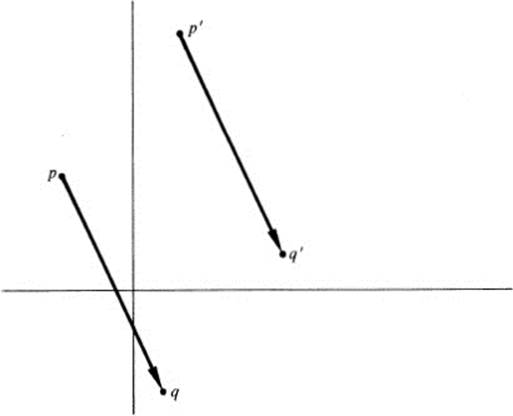
FIGURE 1.2 Two displacements corresponding to the same vector
To represent vectors analytically, we set up a rectangular coordinate system in the plane. We use the notation
![]()
to represent the vector whose components in the x and y directions are a and b, respectively. This vector may be pictured as the displacement from any point (x1, y1) to the point (x1 + a, y1 + b) (Fig. 1.3). Thus if p and q have coordinates (x1, y1) and (x2, y2) (Fig. 1.4) and if the displacement vector from p to q is ![]() a, b
a, b![]() , then we must have x1 + a = x2, y1 + b = y2, or
, then we must have x1 + a = x2, y1 + b = y2, or
![]()
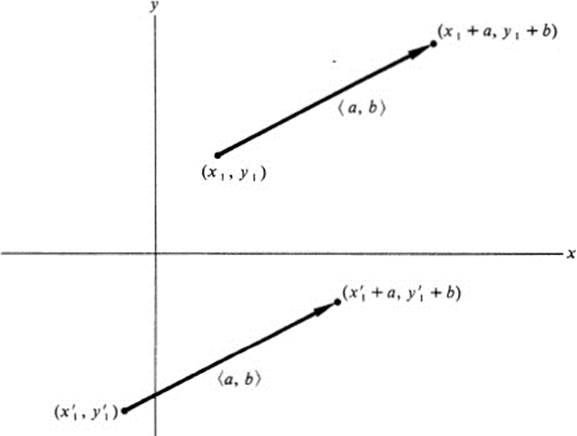
FIGURE 1.3 Displacements corresponding to a vector given in terms of components
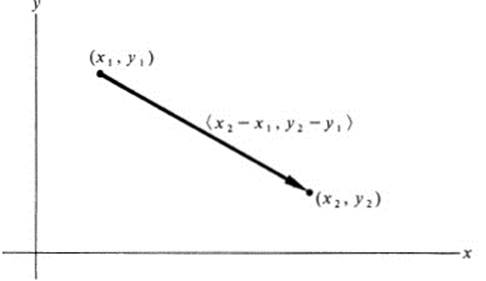
FIGURE 1.4 The components of a displacement vector
Note that the vector ![]() a, b
a, b![]() describes the relative position of q to p. The first component describes how far q is to the right of p (or left, if a is negative), and the second component describes how far q is above p (or below, if b is negative).
describes the relative position of q to p. The first component describes how far q is to the right of p (or left, if a is negative), and the second component describes how far q is above p (or below, if b is negative).
Example 1.1
The vector ![]() 2, −3
2, −3![]() describes a displacement of 2 units to the right and 3 units down (Fig. 1.5).
describes a displacement of 2 units to the right and 3 units down (Fig. 1.5).
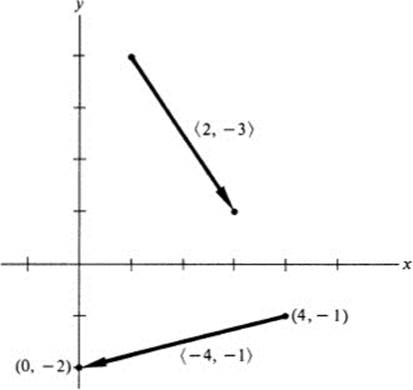
FIGURE 1.5 Examples of vectors
Example 1.2
The displacement vector from the point (4, −1) to (0, −2) is given by ![]() 0 − 4, −2 − (−1)
0 − 4, −2 − (−1)![]() =
= ![]() −4, −1
−4, −1![]() . Thus the second point is 4 units to the left and 1 unit below the first (Fig. 1.5).
. Thus the second point is 4 units to the left and 1 unit below the first (Fig. 1.5).
Example 1.3
If the x axis points to the East and the y axis to the North, then a displacement of 5 units in the Northeast direction describes the hypothenuse of a right isosceles triangle whose sides have length 5/![]() . Thus, in terms of components, this vector is (Fig. 1.6)
. Thus, in terms of components, this vector is (Fig. 1.6)
![]()
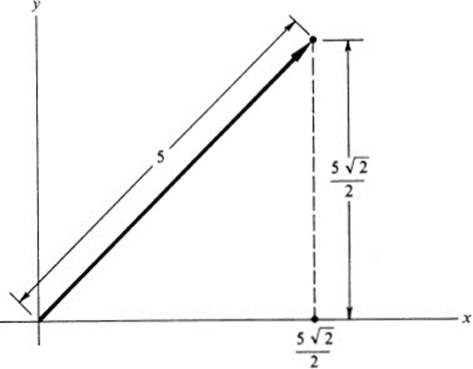
FIGURE 1.6 Components of the vector “5 miles to the Northeast”
Algebraic Operations on Vectors
Addition of vectors is modeled on a succession of displacements. If we perform two displacements successively, each characterized, say, by a length and a direction, then we define the sum of these separate displacements to be the total displacement. Pictorially, we find the sum of two vectors represented as the third side of a triangle whose other two sides are given by the original vectors. The resulting vector can be most easily described in terms of components. If we wish to add the vectors ![]() a, b
a, b![]() and
and ![]() c, d
c, d![]() , considered as displacements, the total displacement is a + c in the x direction and b + d in the y direction (Fig. 1.7). We therefore make the following definition.
, considered as displacements, the total displacement is a + c in the x direction and b + d in the y direction (Fig. 1.7). We therefore make the following definition.
Definition 1.1 Addition of Vectors The sum of two vectors ![]() a, b
a, b![]() ,
, ![]() c, d
c, d![]() is defined by the rule
is defined by the rule
![]()
All the basic properties of vector addition may be derived from this formula. For example, the fact that the value of the sum is independent of the order in which we add. This property is not completely obvious from our original description in terms of successive displacements (Fig. 1.8), but it becomes clear if we use elementary geometry and note that in both cases the sum is the diagonal of a parallelogram whose pairs of opposite sides are the given vectors (Fig. 1.9). This is known as the parallelogram law for addition of vectors.
Besides adding vectors, we may consider any multiple of a given vector. “Twice a vector” would consist of going twice as far in the same direction (Fig. 1.10). In general, a multiple of a vector has components that are the same multiple of the original components. We use this as our definition.
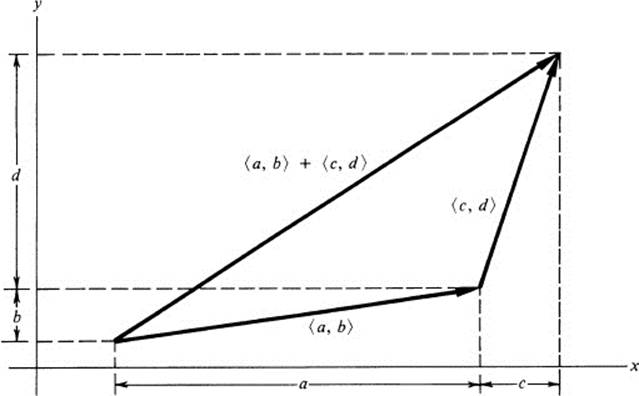
FIGURE 1.7 Addition of vectors
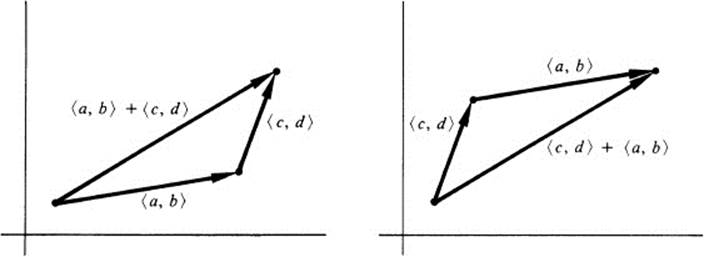
FIGURE 1.8 Adding vectors in different orders
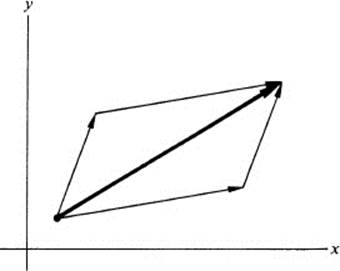
FIGURE 1.9 Parallelogram law for addition of vectors
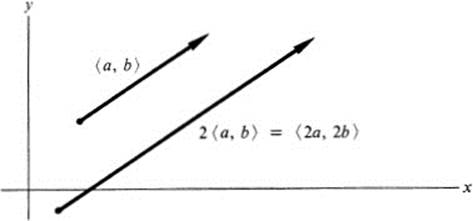
FIGURE 1.10 Multiplication of a vector by 2
Definition 1.2 Multiplication of Vectors by Scalars If ![]() a, b
a, b![]() is any vector and λ is any number, we define their product to be
is any vector and λ is any number, we define their product to be
![]()
The term scalar used in this connection has the following significance. Vectors, like numbers, are mathematical objects that may be combined according to certain rules. In elementary algebra we learn the basic rules for operations with numbers. In order to state these, we use letters to represent arbitrary numbers, and we can then state general rules, such as
![]()
In vector algebra, we proceed analogously, but there is a new feature. When dealing with a vector we are also interested in certain quantities such as its magnitude and its components, which are not vectors but numbers. Thus, we are dealing simultaneously with two kinds of mathematical objects, vectors and numbers. The word scalar is simply a synonym used for number in this context, when we wish to distinguish between “vector quantities” and purely numerical or “scalar” quantities. Thus, Def. 1.2 of multiplication of a vector by a scalar describes an algebraic operation that combines a scalar and vector to produce a new vector.
When we wish to state basic rules for algebraic operations that involve both vectors and scalars, we use certain letters for vectors and others for scalars. We could precede each formula by a statement explaining which letters represent which type of object, but it is much more convenient to adopt a uniform notation so that one may distinguish at a glance. We shall adopt the convention of using letters in boldface type to represent vectors, and those in ordinary type to represent numbers. Thus the equation
![]()
means that the letter v stands for the vector whose components are the numbers a, b.
We list some of the basic rules of vector algebra as follows:
In these equations v, w, and z represent arbitrary vectors, and λ and μ arbitrary scalars. Each equation asserts an equality between vectors and is verified by simply comparing the components of the vectors on each side of the equation. In general, a vector equation is equivalent to two ordinary scalar equations.
For the magnitude of the vector v we use the notation
![]()
By the Pythagorean theorem
![]()
if v = ![]() a, b
a, b![]() (Fig. 1.11). To describe the direction of a vector, it is convenient to use the angle from the positive x direction to the vector, measured in the counterclockwise direction (Fig. 1.12). If we denote this angle by a, then the components a, b of the vector are given by
(Fig. 1.11). To describe the direction of a vector, it is convenient to use the angle from the positive x direction to the vector, measured in the counterclockwise direction (Fig. 1.12). If we denote this angle by a, then the components a, b of the vector are given by
![]()
Thus we may express any vector v in the form
![]()
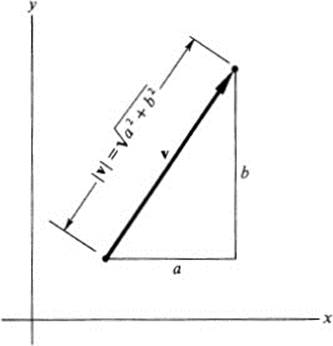
FIGURE 1.11 Magnitude of a vector
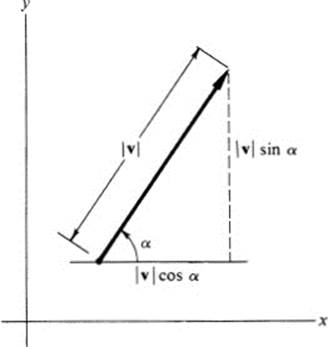
FIGURE 1.12 Direction of a vector
that is, in terms of its magnitude |v| and its direction α. Note that the vector ![]() cos α, sin α) has magnitude 1, and, conversely, if |v| = 1, then v =
cos α, sin α) has magnitude 1, and, conversely, if |v| = 1, then v = ![]() cos α, sin α
cos α, sin α![]() . We use the notation Tα for this vector. Thus,
. We use the notation Tα for this vector. Thus,
![]()
A vector of magnitude 1 is called a unit vector.
Note that if v = ![]() a, b
a, b![]() , than α is uniquely defined by the equations
, than α is uniquely defined by the equations

provided (a2 + b2)1/2 ≠ 0. But a2 + b2 = 0 only when both a = 0 and b = 0.
When describing vectors in terms of components, it is natural to consider any pair of numbers a, b and, in particular, the pair 0, 0. The corresponding vector is called the zero vector and denoted by 0. Thus
![]()
Note that
1. |0| = 0
2. If |v| = 0, then v = 0.
Thus the zero vector has a well-defined magnitude (zero) and is characterized by this property. It is, however, the only vector that does not have a well- defined direction. As a displacement vector, it corresponds to staying at the same point, which consists in going no distance and in no particular direction.
Corresponding to each vector v = ![]() a, b
a, b![]() , we have the opposite vector
, we have the opposite vector ![]() −a, −b
−a, −b![]() , which we denote by −v.
, which we denote by −v.
Note that
1. –v = – 1 v
2. |∇v| = |v|
3. if v = λ![]() COS α, sin α),
COS α, sin α),
then –v = λ![]() COS (α ± π), sin (α ± π)
COS (α ± π), sin (α ± π)![]() (Fig. 1.13).
(Fig. 1.13).
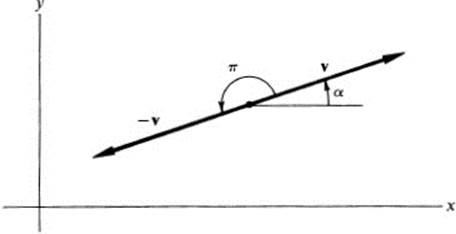
FIGURE 1.13 Opposite vectors
For each vector v, the vector –v may be characterized algebraically by the property
![]()
This equation may be described by saying that “–v is the additive inverse of v.”
Similarly, we may introduce the operation of subtraction as the inverse operation of addition. For any vectors v, w, we define the vector v – w by
![]()
Then v – w can be characterized as the unique vector which, when added to w, gives v, that is,
![]()
Geometrically, the above two equations are depicted in Fig. 1.14, which shows equivalent representations of the vector v – w. In terms of components, we have simply
![]()
The most important single formula in elementary vector algebra allows us to compare the directions of two vectors v, w, or equivalently, to find the
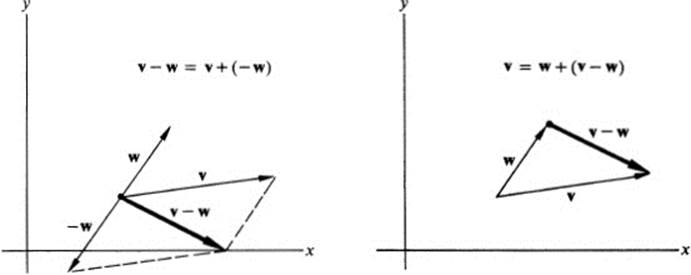
FIGURE 1.14 Subtraction of vectors
angle between them. If we let v = ![]() a, b
a, b![]() , w =
, w = ![]() c, d
c, d![]() , and if θ is the angle between the corresponding displacements, then by applying the law of cosines we find (Fig. 1.15)
, and if θ is the angle between the corresponding displacements, then by applying the law of cosines we find (Fig. 1.15)
![]()
or

![]()
The expression on the left-hand side of Eqs.(1.1) arises so often when dealing with pairs of vectors, that a special designation is used for it (in fact, at least three different designations are currently used).
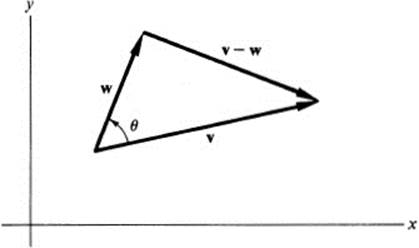
FIGURE 1.15 Angle between vectors
Definition 1.3 Given two vectors v = ![]() a, b
a, b![]() and w =
and w = ![]() c, d
c, d![]() , their dot product is denoted by v · w and defined by
, their dot product is denoted by v · w and defined by
![]()
The terms scalar product and inner product are also frequently used for this expression.
Example 1.4
![]()
Note that the dot product of any two vectors is a scalar (whence the term scalar product).
We may now rewrite Eq.(1.1) as follows. If v and w are any two nonzero vectors, then the angle θ between them is given by
![]()
Example 1.5
![]()
Then v · w = 4, |v| = ![]() , |w| =
, |w| = ![]() , and cos θ =
, and cos θ = ![]() .
.
There are two special cases of importance. The first is the dot product of a vector with itself. We have the elementary, but basic, formula
![]()
The second is the case in which we form the dot product of a vector v with a unit vector T. We have |T| = 1, and hence
![]()
Geometrically, v · T represents the projection of the vector v in the direction of the unit vector T. Note that this projection is considered positive if θ < ![]() π and negative if θ
π and negative if θ ![]()
![]() π (Fig. 1.16). If θ =
π (Fig. 1.16). If θ = ![]() π, the projection is of course zero.
π, the projection is of course zero.
Definition 1.4 Two vectors v, w are called orthogonal if v · w = 0. We write v ⊥ w.
From Eq. (1.1) we see that there are precisely three cases in which v ⊥ w. Either v = 0, or w = 0, or else neither is zero and the angle θ between them satisfies cos θ = 0, that is, θ = ![]() π. When we speak of orthogonal vectors,
π. When we speak of orthogonal vectors,
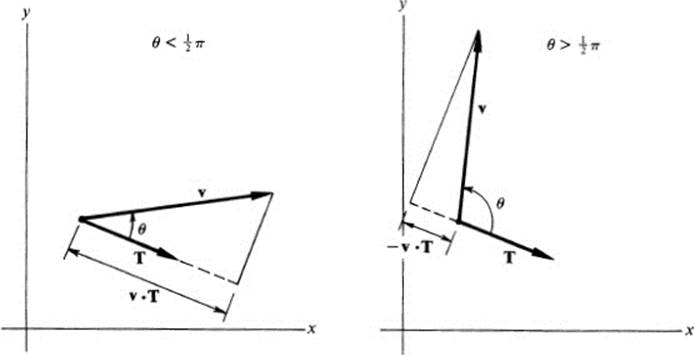
FIGURE 1.16 Projection of vectors
we usually have in mind the third case, but it is convenient to include the case of zero vectors. From our definition the zero vector is then orthogonal to every vector.
We conclude this section by proving two elementary lemmas concerning orthogonal vectors. These lemmas are often considered to be “self-evident,” but they are frequently used and it is worthwhile to give their proofs.
Lemma 1.1 Let v = ![]() a, b
a, b![]() be an arbitrary nonzero vector. Then a vector w is orthogonal to v if and only if w is of the form λ
be an arbitrary nonzero vector. Then a vector w is orthogonal to v if and only if w is of the form λ![]() −b, a
−b, a![]() .
.
PROOF. If w = λ![]() −b, a
−b, a![]() , then v · w = λ(− ba + ab) = 0. Conversely, if w =
, then v · w = λ(− ba + ab) = 0. Conversely, if w = ![]() c, d
c, d![]() and v · w = 0, we have ac + bd = 0 or ac = −bd. Hence,
and v · w = 0, we have ac + bd = 0 or ac = −bd. Hence,

Since v ≠ 0, a and b cannot both be zero, and we may therefore write w in one of the two forms
![]()
Lemma 1.2 Let v = ![]() a, b
a, b![]() and w =
and w = ![]() c, d
c, d![]() be orthogonal nonzero vectors. Then every vector u =
be orthogonal nonzero vectors. Then every vector u = ![]() e, f
e, f![]() can be written in the form
can be written in the form
![]()
PROOF. Equation (1.2) represents the two scalar equations
which have the (unique) solution λ = (ed – fc)/(ad – bc), μ = (af – be)/(ad – bc), provided ad – bc ≠ 0. But by Lemma 1.1 w = ![]() c, d
c, d![]() = v
= v![]() –b, a
–b, a![]() , for some scalar v. In other words, c = –vb, d = va, and hence ad – bc = v(a2 + b2) ≠ 0, since w = v
, for some scalar v. In other words, c = –vb, d = va, and hence ad – bc = v(a2 + b2) ≠ 0, since w = v![]() –b, a
–b, a![]() ≠ 0.
≠ 0. ![]()
It is most convenient to apply Lemma 1.2 in the case where the vectors v and w have unit length. We have then
![]()
or equivalently,
![]()
If we use Eq. (1.2) for an arbitrary vector u, and take the dot product of both sides with v and w, respectively, we find

Thus the coefficients λ, μ represent the projections of the vector u in the directions of v and w, respectively (Fig. 1.17).
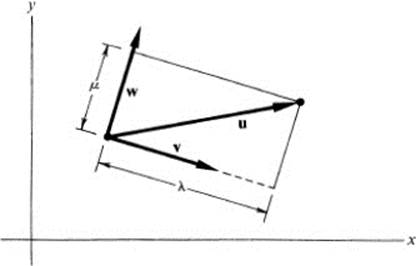
FIGURE 1.17 Components of a vector with respect to a pair of orthogonal unit vectors
It is sometimes convenient to introduce the special unit vectors i = ![]() 1, 0
1, 0![]() , j =
, j = ![]() 0, 1
0, 1![]() , which are clearly orthogonal. Then an arbitrary vector v =
, which are clearly orthogonal. Then an arbitrary vector v = ![]() a, b
a, b![]() may be written as
may be written as
![]()
We see that the components of a vector are precisely the projections of the vector in the direction of the x and y axes, respectively, and that the representation of a vector by its components is merely a special case of Eq. (1.2).
Exercises
1.1 For each of the following pairs of points, write down (in terms of components) the displacement vector from the first point to the second, and illustrate with a sketch.
a. (2, 3), (4, 4)
b. (4, 4), (2, 3)
c. (2, 3), (3, 2)
d. (3, −1), (−1, 3)
e. (−2, −1), (0, 0)
f. (3, 2), (−1,2)
1.2 For each of the following vectors v, find |v| (the magnitude of v) and α (the direction of v), and illustrate with a sketch.
a. ![]() 3, 0
3, 0![]()
b. ![]() −1, 0
−1, 0![]()
c. ![]() −1,
−1, ![]()
![]()
d. ![]() −2, −2
−2, −2![]()
e. ![]() 0, −
0, − ![]()
![]()
f. ![]() 4, −4
4, −4![]()
1.3 Find the components of a vector v whose magnitude and direction are given by
a. |v| = 5, α = ![]() π
π
b. |v| = 2, α = π
c. |v| = 2, α = ![]() π
π
d. |v| = 1, α = ![]() π
π
e. |v| = 5, α = tan −1 ![]() , 0 < α < π
, 0 < α < π
f. |v| = 1, α = tan −1 (– ![]() ), π < α < 2π
), π < α < 2π
1.4 Let v1 = ![]() 2, 1
2, 1![]() , v2 =
, v2 = ![]() −2, 4
−2, 4![]() , v3 =
, v3 = ![]() 0, −5
0, −5![]() . Find
. Find
a. v1 + v2 + v3
b. |v1|2 + |v2|2 - |v3|2
c. v1 · v2
d. 3v1 + ![]() v2 + v3
v2 + v3
Interpret your answers with a sketch.
1.5 Let v = ![]() 2, 5
2, 5![]() , w =
, w = ![]() a, 4
a, 4![]() . Find a value of a such that the vectors v and w
. Find a value of a such that the vectors v and w
a. have the same length
b. have the same direction
c. are perpendicular
1.6 Find the angle between the following pairs of vectors.
a. ![]() 1, 3
1, 3![]() and
and ![]() 6, −2
6, −2![]()
b. ![]() 2, 3
2, 3![]() and
and ![]() 10, 2
10, 2![]()
c. ![]()
![]() , 1
, 1![]() and
and ![]() −3,
−3, ![]()
![]()
d. ![]() −
− ![]() ,
, ![]()
![]() and
and ![]() 2, −
2, − ![]()
![]()
1.7 Write out the following vector statements in terms of components and verify
a. v · w = w · v
b. (λv) · w = λ(v · w)
c. u · (v + w) = u · v + u · w
d. |v · w| ≤ ![]() |v| |w|
|v| |w|
e. |λv| = |λ| |v|
1.8 Deduce each of the following from the relations given in Ex. 1.7a, b, c, d.
a. u · (λv + μw) = λ(u · v) + μ(u · w)
b. |v + w|2 = |v|2 + 2v · w + |w|2 (Hint: |u|2 = u · u).
c. |v + w| ≤ |v| + |w| (Hint: square both sides)
d. |v − w| ≤ |v| + |w|
e. |v|2 − |w|2 = (v − w) · (v + w)
*1.9 a. Show that if ![]() a, b
a, b![]() and
and ![]() c, d
c, d![]() are any two vectors, then ad − bc = 0 if and only if one of the vectors is a scalar multiple of the other. (Hint: apply Lemma 1.1 to the vectors
are any two vectors, then ad − bc = 0 if and only if one of the vectors is a scalar multiple of the other. (Hint: apply Lemma 1.1 to the vectors ![]() a, b
a, b![]() and
and ![]() d, −c
d, −c![]() .) See also Ex. 1.29 for another proof of this fact.
.) See also Ex. 1.29 for another proof of this fact.
b. Show that equality holds in Ex. 1.7d if and only if one of the vectors is a scalar multiple of the other.
c. Under what conditions does equality hold in Ex. 1.8c?
d. Each of the inequalities in Ex. 1.8c, d is referred to as “the triangle inequality” Show the reason for this terminology by appropriate sketches illustrating each of the inequalities. Show by sketches how equality may occur in each case.
1.10 Let v = ![]() a, b
a, b![]() , w =
, w = ![]() b, a
b, a![]() . Show that (v − w) ⊥
. Show that (v − w) ⊥ ![]() 1, 1
1, 1![]() . Interpret geometrically in terms of the triangle with vertices (0, 0), (a, b), and (b, a).
. Interpret geometrically in terms of the triangle with vertices (0, 0), (a, b), and (b, a).
1.11 Let V and W be any two orthogonal unit vectors, and let v = aV + bW, w = cV + dW. Show that v · w = ac + bd. (Hint: use Ex. 1.7.)
Exercises 1.12−1.18 illustrate various ways in which vectors may be used to derive results in plane geometry.
1.12 Let A, B, C, be the vertices of a triangle T, and let v, w be the displacement vectors from A to B and from A to C, respectively. Write down conditions, in terms of the vectors v, w, and u = v − w, such that
a. T is isosceles
b. T is equilateral
c. T is a right triangle
d. the angle at A is obtuse
1.13 Use the notation of the preceding exercise.
a. Prove that the angle at 5 is a right angle if and only if v · w = |v|2.
b. Find a vector representing the median dropped from A to side BC.
c. Draw a picture indicating that the median dropped from B to side AC is represented by the vector ![]() w − v.
w − v.
d. Verify that v + ![]() (
(![]() w − v) =
w − v) = ![]() [
[![]() (v + w)]. Interpret geometrically, and deduce that the three medians of a triangle intersect at a point.
(v + w)]. Interpret geometrically, and deduce that the three medians of a triangle intersect at a point.
1.14 Let Q be a quadrilateral with vertices A, B, C, D. Let u, v, w be the displacement vectors from A to B, C, and D, respectively. Express the following displacement vectors in terms of u, v, and w.
a. The sides of Q, from B to C and from D to C
b. The diagonal from B to D
c. From the midpoint of AB to the midpoint of BC
d. From the midpoint of AD to the midpoint of DC
e. From A to the midpoint of AC
f. From A to the midpoint of BD
1.15 Use the notation of the preceding exercise.
a. Show that if one pair of opposite sides of Q are parallel and equal in length, then the same is true of the other pair, and Q is a parallelogram.
b. Show that the midpoints of the sides of Q are the vertices of a parallelogram.
c. Show that Q is a parallelogram if and only if the diagonals bisect each other.
d. Show that if Q is a parallelogram, then the sums of the squares of the diagonals equals the sum of the squares of the sides.
1.16 Show that the equation of a straight line, ax + by = c, can be written in vector form as
![]()
where (x0, y0) is any point on the line. Interpret geometrically. What geometric meaning can you ascribe to the pair of numbers a, b, which appear as coefficients in the equation of the line ?
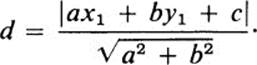
1.17 Let ax + by + c = 0 be the equation of a line L.
a. Show that N = ![]() a, b
a, b![]() /(a2 + b2)1/2 is a unit vector orthogonal to L (See Ex. 1.16.)
/(a2 + b2)1/2 is a unit vector orthogonal to L (See Ex. 1.16.)
b. Show that if (x1, y1) is an arbitrary point, and if (x0, y0) is a point on L, then |![]() x1 − x0, y1 − y0
x1 − x0, y1 − y0![]() · N| represents the perpendicular distance from (x1, y1) to L.
· N| represents the perpendicular distance from (x1, y1) to L.
c. Using part b, show that the distance d from (x1, y1) to L is given by
1.18 Draw a sketch showing the vectors ![]() cos α, sin α
cos α, sin α![]() and
and ![]() − sin α, cos α
− sin α, cos α![]() as displacement vectors starting at the origin.
as displacement vectors starting at the origin.
a. How are these vectors placed with respect to the coordinate axes and with respect to each other?
b. Find the projections of the vector ![]() x, y
x, y![]() in the direction of each of these vectors.
in the direction of each of these vectors.
c. Given a point whose original coordinates are (x, y), derive, the formulas
for its coordinates (X, Y) with respect to a pair of axes making an angle α with the x and y axes.
If a velocity is represented as a vector by its magnitude and direction, then algebraic operations on these vectors have physical significance. (This is not surprising, since velocities are merely displacements per unit time.) For example, if one motion is superimposed on another, the resultant velocity is represented as a vector sum. Also, the apparent velocity relative to a moving observer is given by the difference of the actual velocity and the velocity of the observer. Both cases are illustrated in Exs. 1.19–1.24.
1.19 A train is traveling along a straight track at 40 miles per hour. A boy in the train throws a ball at 30 miles per hour in a direction perpendicular to the motion of the train and parallel to the ground. Find the speed-and direction of the ball relative to the ground, and illustrate with a vector diagram.
1.20 Answer Ex. 1.19 under the assumption that the ball is thrown at the same speed but at an angle of 60° with the forward direction of the train.
1.21 A plane flying toward the Northeast at an airspeed of 120 miles per hour is subjected to a 50 mile an hour wind from the Southeast. What is the speed of the plane relative to the ground?
1.22 A river flows due South at 2 miles per hour. A swimmer whose speed is 4 miles an hour wishes to cross to a point directly opposite. In which direction should he head?
1.23 A passenger on a boat traveling due East notices that a flag on the boat is pointing directly to the South. When the speed of the boat is doubled, the flag points toward the Southwest. What is the direction of the wind?
1.24 An important factor in astronomical measurements is the aberration of light. This phenomenon consists in a displacement in position due to the fact that the apparent velocity vector of light reaching the earth from a star is equal to the difference between the actual velocity vector of the light and the velocity vector of the earth’s motion around the sun. Show by a vector diagram how the apparent direction of a star in the plane of the earth’s orbit varies according to the position of the earth in its orbit. (Assume that the star is sufficiently far away so that light rays coming from it may be considered parallel, independent of the earth’s position in its orbit. It is a fact that the “parallax,” or displacement in direction caused by the light rays not being exactly parallel, is considerably smaller than the effect of the aberration of light.)
A force in physics is a quantity having a given magnitude and direction. If a number of forces act on a point, and if each is represented by a vector having the given magnitude and direction, then the total effect is the same as that of a single force called the resultant, corresponding to the vector sum of the given forces. Exs. 1.25–1.28 are illustrations.
1.25 Four forces of magnitude 2, 3, 4, and 5, respectively, act on a point at the origin. These forces are directed inward along the diagonals through the first, second, third, and fourth quadrants, respectively. Find the magnitude and direction of the resultant force.
1.26 A force F, of magnitude 8, is directed downward and to the right at an angle of 30° with the vertical. Find a pair of forces, one horizontal and one vertical, whose resultant is F.
1.27 A system of forces is in equilibrium if their resultant is zero.
a. Under what conditions are two forces in equilibrium?
b. Show that three forces are in equilibrium if and only if the corresponding vectors, suitably translated, represent the three sides of a triangle described in succession.
1.28 Newton's law of gravity states that the gravitational effect of a body of mass m1 on a body of mass m2 at a distance is a force whose direction is along the line joining the two bodies, and whose magnitude is Gm1m2/d2, where G is a fixed constant.
Suppose that two bodies of masses m1 and m2 are a fixed distance d apart, and that both of them act on a third body of mass m.
a. Find the position of the third body such that the two forces are in equilibrium, and show that this position depends on the distance d and the ratio λ = m2/m1, but not on the mass m or the constant G.
b. Show that in the case of the earth and the moon, where λ is approximately 0.012, the equilibrium position is approximately ![]() of the way from the earth to the moon.
of the way from the earth to the moon.
The basic facts concerning a pair of simultaneous linear equations are osf great importance and are used throughout this book. They are the following. The equations
have one and only one solution for every choice of e and f provided the determinant
is not zero. This unique solution may be written as
In case the determinant is zero, either there is no solution or there are infinitely many solutions, depending on the values of e and f. These facts are related to certain properties of vectors as is shown in Exs. 1.29 and 1.30.
1.29 Let v = ![]() a, b
a, b![]() , w =
, w = ![]() c, d
c, d![]() be nonzero vectors, and let θ be the angle between them.
be nonzero vectors, and let θ be the angle between them.
a. Show that |v|2|w|2 – (v · w)2 = (|v| |w| sin θ)2.
b. Writing out the left-hand side of the above equation in terms of components, show that
![]()
c. Let T be a triangle with vertices A, B, C and let v, w be the vectors from A to B and from A to C, respectively. Show that the altitude from the vertex C to the side AB is equal to |w| |sin θ|.
d. Show that ![]() |ad – bc| = area of triangle T.
|ad – bc| = area of triangle T.
(Note: this is an important geometric interpretation of the determinant.)
e. Use part d to show geometrically that ad − bc = 0 if and only if the vectors v and w have the same or opposite directions. (Compare with Ex. 1.9a.)
1.30 Let v = ![]() a, b
a, b![]() and w =
and w = ![]() c, d
c, d![]() be nonzero vectors.
be nonzero vectors.
a. Describe the totality of straight lines ax + by = e, for different values of the constant e, in terms of the vector v. (Hint: see Ex. 1.16.)
b. Using part a and Ex. 1.29e, show that the condition ad − bc ≠ 0 implies that the two straight lines whose equations are ax + by = e and cx + dy = f are not parallel, and hence, no matter how e and f are chosen, there is a unique point of intersection.
c. Show that if ad − bc = 0, the two lines in part b are either parallel and distinct or else identical, so that the two equations either have no common solutions or else the simultaneous solutions consist of all points lying on the line ax + by = e.