University Mathematics Handbook (2015)
XI. Ordinary Differential Equations, or ODE
Chapter 4. Systems of First-Order Linear Equations
4.1 Definition
a. The system
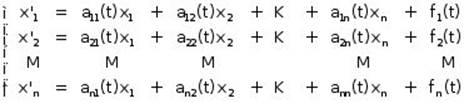 (*)
(*)
is a non-homogeneous linear ODE system.
b. If ![]() , then the system is homogeneous.
, then the system is homogeneous.
c. if functions ![]() and
and ![]() ,
, ![]() are continuous on
are continuous on ![]() , and
, and ![]() , then system (*) has a unique solution holding the initial conditions.
, then system (*) has a unique solution holding the initial conditions.
![]() (**)
(**)
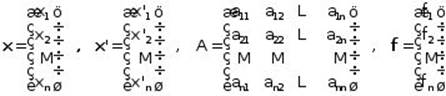
d. Vector form of a first-order ODE system
![]()
where
4.2 Homogeneous System of ODE ![]()
a. Set of Vectors ![]() is a basis of a solution space, if they are
is a basis of a solution space, if they are ![]() LI solutions of system (*) on
LI solutions of system (*) on ![]() . In this case, any other solution is their linear combination.
. In this case, any other solution is their linear combination.
b. The determinant ![]() is called Wronskian.
is called Wronskian.
c. If ![]() are
are ![]() -solutions of (*) with continuous coefficients on
-solutions of (*) with continuous coefficients on ![]() , then, in this interval, the Wronskian is identically equal to zero or never vanishes.
, then, in this interval, the Wronskian is identically equal to zero or never vanishes.
4.3 Homogeneous System of First-Order Linear Equations with Constant Coefficients
Let ![]() be linear ODE when
be linear ODE when ![]() is constant matrix.
is constant matrix.
a. If matrix ![]() has
has ![]() different eigenvalues
different eigenvalues ![]() and
and ![]() eigenvectors corresponding them, then
eigenvectors corresponding them, then
![]()
is a basis of the solution space.
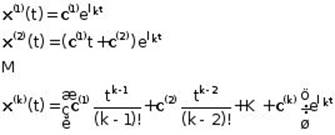
b. If eigenvalue ![]() of matrix
of matrix ![]() has algebraic multiplicity
has algebraic multiplicity ![]() but its geometric multiplicity is smaller than the algebraic one, we construct
but its geometric multiplicity is smaller than the algebraic one, we construct ![]() linearly independent vectors
linearly independent vectors ![]() in the following way
in the following way
![]() ,
, ![]()
Vectors ![]() are a set of LI eigenvectors, corresponding to
are a set of LI eigenvectors, corresponding to ![]() and
and
are k LI solutions of the system corresponding to ![]() .
.
4.4 Non-homogeneous System of First-Order Linear Equations
![]() (*)
(*)
Let
![]()
be an ![]() matrix, where the columns are solutions of the corresponding homogeneous system. The general solution of the homogeneous system is
matrix, where the columns are solutions of the corresponding homogeneous system. The general solution of the homogeneous system is ![]() , when
, when ![]() is a constant vector.
is a constant vector.
Varying the parameter, we look for a particular solution of system (*) in the form of ![]() . Substituting in (*), we get equation system
. Substituting in (*), we get equation system ![]() , the solutions of which are
, the solutions of which are ![]() . Therefore, the final solution is
. Therefore, the final solution is
![]()
when ![]() is an arbitrary vector.
is an arbitrary vector.